
กรณีศึกษา :
การตรวจสอบความเข้ากันได้ระหว่างส่วนวัดค่าปริมาตร, ทรานสดิวเซอร์, ส่วนประมวลผลและส่วนแสดงค่าของมาตรวัดปริมาตรของเหลวชนิด Positive Displacement
Compatibility checking of modules (Meter Sensor, Transducer, Calculator and Indicating Device) of PD Flowmeters
ดูเหมือนประโยค “The World is flat.” จะแสดงผลออกมาให้ชัดเจนในงานชั่งตวงวัดตามข้อบัญญัติของกฎหมาย (Legal Metrology) โดยเฉพาะคำว่า “Collaboration” ก็ดูจะโดดเด่นเสียเหลือเกินในการจะบูรณาการเชื่อมโยงสาระสิ่งอันเข้าด้วยกัน หากจะเฉยเมยแล้วเชื่อใจผู้ประกอบการภาคเอกชนเสียไปทั้งหมด คิดว่าภาคเอกชนเก่งเสียไปทุกเรื่อง เราจะอาศัยพึ่งพาให้ภาคเอกชนค้ำจุนงานชั่งตวงวัดตามข้อบัญญัติของกฎหมายของราชอาณาจักรไทยไปเสียทุกอย่างอัน อันนี้ก็ใช้ไม่ได้ จำเป็นต้องสร้างระบบที่มีการถ่วงดุลและตรวจสอบซึ่งกันและกัน หรือระบบ Feed Back Control ก็น่าจะดีกว่า จะปล่อยให้ภาคเอกชนที่เราเข้าใจว่าเก่งไปเสียทุกเรื่อง (จริงหรือไม่?) อาจจะใช่นะแต่ต้องมั่นใจว่าภาคเอกชนมีหลักคุณธรรมความรับผิดชอบ อีกทั้งมีหิริโอตัปปะคอยกำกับการทำงานด้วยหรือเปล่าถือเป็นสิ่งสำคัญและยังสงสัยอยู่ เพราะราชอาณาจักรไทยต้องการ “คนดี และ คนเก่ง” หากไม่เก่งก็ขอให้เป็น “คนดี” ก็ถือว่าเป็นบุญแก่ราชอาณาจักรไทยอย่างสูงสุดแล้วครับ..
พบว่า “The World is flat.” กับ “Collaboration” มีผลต่องานชั่งตวงวัดตามข้อบัญญัติของกฎหมาย (Legal Metrology) อย่างมีนัยสำคัญเหมือนกับทุกภาคส่วน เพียงแต่ “ภาคราชการ” มีประสาทสัมผัสรับรู้การเปลี่ยนแปลงช้ามาก (ไม่ถึงกับตายด้าน แต่..ก็ใกล้เคียงครับ) อย่างเช่นโดยเข็มแทงเข้ามาในเนื้อตัวมา 1 ปี แล้วพึ่งร้องโอ้ยว่า “เจ็บๆๆๆๆ” แบบพูดให้มันเวอร์อลังการงานสร้างมากไปบ้างก็เพื่อความมันส์ๆๆๆๆ ในอารมณ์ ..มันก็เท่านั้น เราพบว่าการทำงานแบบ “Collaboration” บวกกับการทำงานที่เรียกว่าแบบ “LEGO” หรือ “Modules” ทำให้เราพบว่าช่วยให้งานชั่งตวงวัดตวงวัดภายในประเทศสามารถตอบสนองความต้องการของทุกภาคส่วนอย่างรวดเร็วและทันต่อความต้องการต่อกิจกรรมเพื่อแก้ไขปัญหาชีวิตของผู้ซื้อ/ผู้ใช้เครื่องชั่งตวงวัด ซึ่งก็ไม่แปลกหรอกครับมันเกิดเหตุการณ์เช่นนี้เหมือนกันทั่วทั้งโลกใบนี้ ราชอาณาจักรไทยก็เพียงแต่โดนสายลมของการเปลี่ยนแปลงพัดผ่านด้วยเช่นกัน แต่ในระหว่างทางก็สร้างปัญหาทิ้งไว้มากมายที่ต้องตามไปเช็ดอุจาระและปัสสาวะเรี่ยราด ต้องเก็บกวาดกันไป...อย่างไม่สิ้นสุด ยกตัวอย่างในยุคสมัยหนึ่งที่เครื่องคอมพิวเตอร์มีขนาดใหญ่ตั้งแต่ระดับ Mainframe จากนั้นค่อยๆลดขนาดเล็กลง.. เล็กลง..ในระดับคอมพิวเตอร์ส่วนบุคคลตามลำดับเวลาที่สอดคล้องกับการพัฒนาตัว Integrated Circuit (IC) ในสมันก่อนเครื่องคอมพิวเตอร์ส่วนบุคคล (Personal Computer; PC) มีราคาในหลักแสนบาทอีกทั้งมีผู้ผลิตเครื่อง PC เพียงไม่กี่ยี่ห้อ อีกทั้งมีรุ่นให้เลือกอย่างจำกัด แต่มาวันนี้เครื่อง PC ราคาหลักพันบาทยันหลักแสนบาท (บางคนเถียงในใจว่า.. หลักล้านก็มีโว้ย.. ครับมีจริงสงสัยจะเป็นของ Apple) แถมผู้ผลิตฯมากมายรวมทั้งสามารถเลือก Specification ของเครื่อง PC ได้อย่างหลากหลายนับไม่ถ้วนยังกับร้านอาหารตามสั่งว่างั้นเถอะ อยากได้เครื่อง PC แรงอย่างไร เดินไปศูนย์การค้าพันธ์ทิพย์พลาซ่าเพียงบอกร้านขายเครื่อง PC ให้ประกอบเครื่อง PC ตามต้องการอย่างไรก็สั่งไป ขอให้รู้ความต้องการของตนเองและมีงบประมาณพอจ่าย ซักครู่เราก็จะได้เครื่อง PC มาครอบครองภายในวันเดียว หรือ 2 ชั่วโมง เพราะทางร้านเค้าสามารถเลือกใช้ชิ้นส่วนอุปกรณ์ที่มีรายละเอียดทางเทคนิคให้เหมาะสมกับความต้อง จากนั้นนำแต่ละชิ้นอุปกรณ์เชื่อมต่อกันเป็นเครื่อง PC โดยที่แต่ละชิ้นส่วนอุปกรณ์ที่นำมาใช้นั้นมาจากการผลิตจากผู้เชี่ยวชาญแต่ละชิ้นส่วนอุปกรณ์แยกอิสระต่อกันแต่ภายใต้ความร่วมมือจากผู้ผลิตชิ้นส่วนคอมพิวเตอร์หลายรายก็สามารถจับชิ้นส่วนแต่ละชิ้นส่วนจากผู้ผลิตฯ ที่มีอยู่กันหลากหลายนำมาประกอบร่างร่วมกันเป็นเครื่อง PC เพื่อสร้างมูลค่าเพิ่มที่มีความหลากหลายตามความต้องการของผู้ซื้อว่าต้องการเครื่อง PC แบบไหน และอย่างไรภายใต้ข้อตกลงข้อกำหนดมาตรฐานการผลิตและมาตรฐานการเชื่อมต่อของแต่ Modules ของชิ้นส่วนอุปกรณ์คอมพิวเตอร์ได้อย่างไร้รอยต่อรอยตะเข็บ อย่าง Smooth as Silk หรือเหมือนของเล่นเด็กยี่ห้อ “LEGO” ว่าเข้าไป เช่นนาย ก. ชอบเล่นเกมส์ ก็เพิ่มการ์ดจอแรงๆ ใส่แรมเยอะๆ CPU จัดๆ จะเป็น Intel หรือ AMD จะมี Socket อย่างไรก็ว่าไป ส่วนจะเลือก Mainboard ยี่ห้อใดรุ่นใด ก็เลือกกันไป ออ พัดลมเยอะๆ ยิ่งดี หัวจะไม่ร้อนตอนเล่นเกมส์ เป็นต้น เมื่อมีคุณ... ก็ย่อมมีโทษ...ครับ มีสิ่งหนึ่งที่ต้องพึ่งระวังและต้องรองรับความเสี่ยงที่อาจจะเกิดขึ้นภายหลังที่เรารับเครื่อง PC ที่สั่งให้ประกอบตามที่เราต้องการไม่ว่าจะจากร้านในพันธ์ทิพย์ หรือร้านไหนภายในราชอาณาจักรไทย สิ่งนั้นคือความรู้และประสบการณ์ของคนทำงานภายในแต่ละร้านค้าที่เราไปสั่งให้ประกอบเครื่อง PC และการบริหารจัดการเพื่อให้ได้ชิ้นส่วนอุปกรณ์ที่นำมาประกอบเครื่อง PC ส่วนเหตุผลอื่นๆ คงมีแหละแต่ตอนนี้ยังนึกไม่ออก เอาเพียงเท่านี้ก่อนนะ และยิ่งเราไม่มีความรู้เครื่อง PC เลย เรายิ่งต้องรองรับความเสี่ยงมากหน่อยเพราะไม่รู้จะตรวจสอบเครื่อง PC ที่เราสั่งประกอบอย่างไร สุดท้ายก็ปลอบใจตนเองว่าร้านเค้าเก่งและไม่หลอกเราหรอกคนบ้านเดียวกันด้วย เป็นต้น แต่หลายคนไม่ต้องการรับความเสี่ยงหรือปัญหาหลังการขายก็หันไปใช้สินค้าที่มี Brands เพราะมั่นใจว่าผู้ขายที่มี Brands จะรักษา Branding ของตนเองและรองรับบริการหลังการขาย ครับนี้เป็นทางเลือกของตลาดการค้าเสรี ตราบใดที่ไม่มีผลกระทบต่อสาธารณะชน หรือประโยชน์ของสาธารณะชนก็ทำกันไป... แต่หากเป็นประโยชน์ของสาธารณะชนและความมั่นคงของราชอาณาจักรไทย เรื่องนี้เป็นหน้าที่ของราชการต้องเข้าไปกำกับดูแลให้ใกล้ชิด.... และนี้แหละคือกลยุทธ์อย่างหนึ่งที่เราต้องใช้ในการบริหารงานชั่งตวงวัดตามข้อบัญญัติของกฎหมาย (Legal Metrology) ของราชอาณาจักรไทยคือ “Branding” ไม่ใช่วันวัน...ก็ต้องการแต่ Outsource.... อ้างความโปร่งใส่ อ้างว่าชงเองกินเอง บัดโถ่....ในระบบราชการการมันก็เป็นเหมือนกันหมดแหละโว้ย.... (ธรรมาภิบาล ไม่ต้องนำมาคิด... แต่เอามาคุยให้เท่ห์ๆๆ.. ก็พอได้ แต่.. ไม่เคยหามาทำ) นั่งตรองดูช้าๆ.. อย่ากระแดะกันเลย หันมาย่อมรับความจริงกันบ้าง ลอง Outsource ข้าราชการไทยดูสิครับ ประเทศเจริญขึ้นอย่างกับติดจรวด....... 5555 ... ขอพูดบ้าง For Fun!!!!
กลับมาเข้าหาเนื้อหาสาระกันต่อ..ผมชอบพาออกไปหาพายุเท้าอยู่เรื่อย อันนี้ต้องขอโทษท่านผู้อ่านมานะที่นี้ด้วย แล้วเราเจออะไรที่มันสะท้อนของ “The World is flat.”, “Collaboration”, “Module”, “LEGO” (จริงๆ น่าจะมีหลายคำแต่เอาแค่นี้ก่อนเพราะผมรู้ไม่มาก) ในส่วนงานชั่งตวงวัดตามข้อบัญญัติของกฎหมาย (Legal Metrology) ที่ต้องมานั่งจิ้มคีย์บอร์ดด้วยความลำบาก จากตัวอย่างที่กล่าวมานั้นเรายังพบว่าเกิดขึ้นไม่เฉพาะวงการผลิตเครื่อง PC แต่ลามและครอบคลุมไปยังสินค้าอุตสาหกรรมอื่นๆ อีกมากมาย ไม่ว่าการผลิตรถยนต์ การผลิตเครื่องใช้ไฟฟ้า การผลิตโทรศัพท์มือถือ ที่สำคัญการผลิตเครื่องชั่งตวงวัดก็เป็นเช่นเดียวกัน ดังนั้นในโลกตะวันตกโดยเฉพาะทางยุโรป ประมาณตั้งแต่ ค.ศ. 2015 เขาเลิกการตรวจสอบต้นแบบเครื่องชั่งตวงวัดหรือ Weighing and Measuring Instrument Type Approval เขาเปลี่ยนเป็น Module Type Evaluations ตามการพัฒนาภาคอุตสาหกรรมไปแล้ว ดังรูปข้างล่าง ส่วนพี่ไทย ก็วันวานยังหวานอยู่... พูดแต่ตรวจสอบต้นแบบเครื่องชั่งตวงวัดพูดมาเกือบ 30 ปี มีเพียงคำนี้ปรากฎในพระราชบัญญัติมาตราชั่งตวงวัด พ.ศ. 2542 และที่แก้ไขเพิ่มเติม ส่วนเรื่องที่เป็นรูปธรรมปฏิบัติกัน.. ยังต้องนึกอยู่ ตอนนี้จะมีการเลือกตั้ง ส.ส. ค่อยไว้กันอีกที ตอนนี้ถือว่าจบข่าว..............กลับบ้านเถอะลูก........
จาก“The World is flat.”, “Collaboration”, “Module”, “LEGO” .....จึงขอยกตัวอย่างมาซัก 2 เรื่องพอเป็นหัวเชื้อทิ้งไว้ หากต้องปรับเปลี่ยนจากการตรวจสอบต้นแบบเครื่องชั่งตวงววัดเป็นการทดสอบและประเมินโมดูลแต่ละองค์ประกอบสำคัญของเครื่องชั่งตวงวัด เช่น
1. เครื่องชั่งไม่อัตโนมัติ เป็นการจับคู่รวมร่างระหว่าง “Loadcell + Indicator (Display)” ซึ่งมาจากหลายผู้ผลิต ซึ่งอาจมีโรงงานตั้งอยู่ในทวีปที่แตกต่างกันไป กระผมได้เขียนไว้แล้วในเรื่อง “การตรวจสอบความเข้ากันได้ระหว่างส่วนแสดงค่ากับโหลดเซลล์ ของเครื่องชั่งไม่อัตโนมัติ (COMPATIBILITY CHECKING OF INDICATOR & LOADCELLS OF NAWI)” ไปหาอ่านดูครับอยู่ใน www.cbwmthai.org แต่ถ้ารู้และเข้าใจอยู่แล้วก็ข้ามไปครับ เรื่องนี้คงจะมีปัญหากันเยอะมากในหลายประเทศ จึงพบว่ามีข้อบัญญัติเป็นแนวทางพิจารณาปรากฎในเอกสาร OIML R76-1 Non-automatic weighing instruments, Edition 2006 (E), The International Organization of Legal Metrology (OIML) ในเรื่องดังกล่าวนี้ ปีนี้ก็ ค.ศ. 2023 ผ่านมากี่ปีแล้วละครับ ผมพึ่งมาเขียนบทความ สงสัยตัวเองจะล้าหลังเป็น 20 ปีแล้วละสิ 55555
2. มาตรวัดปริมาตรของเหลว เป็นจับคู่รวมร่างระหว่าง “Measuring Device + Indicating Device” ซึ่งก็มาจากหลากหลายผู้ผลิตเช่นกัน คงมีปัญหาเช่นกัน แต่ยังไม่เห็นปรากฏในเอกสาร OIML R 117-1 Edition 2007(E), Dynamic Measuring Systems for Liquids Other Than Water; Part 1: Metrological and Technical Requirements, International Organization of Legal Metrology (OIML) แต่ชั่งตวงวัด ตัวผม..เริ่มรับรู้ปัญหาแล้วสิครับ และก็ช้า... เช่นเดิม 555 (หมายถึงตัวผมน่ะครับ) จากที่เคยมีหลักคิดว่าว่าผู้ขายและผู้ติดตั้งระบบการวัดปริมาตรของเหลวผลิตภัณฑ์ของเหลวปิโตรเลียมจะมีความรู้ความสามารถเหนือกว่าเกณฑ์เฉลี่ย อีกทั้งน่าจะเลือกใช้อุปกรณ์ที่เกี่ยวข้องให้ทำงานร่วมกันอย่างมีคุณภาพเพื่อส่งมอบคุณภาพที่ดีให้กับลูกค้า ในขณะเดียวกันก็มีหลักคิดเช่นเดียวกันว่าผู้ใช้งานหรือผู้ครอบครองระบบฯ ดังกล่าว (ทางด้านอุตสาหกรรมปิโตรเลียม) จะมีความรู้เพียงพอที่ทำการตรวจสอบและทำหน้าที่รักษาผลประโยชน์ของตนเองได้อย่างสมเหตุสมผลเพราะถือว่าบุคคลากรในวงการฯนี้เป็นสังคมของผู้มีความรู้ความสามารถทำหน้าที่ “Check and Balance” ซึ่งกันและกันได้ทุกภาคส่วน ยังรวมไปถึงผู้ประกอบการที่ให้บริการตรวจสอบระบบฯ ที่เรียกว่า “Third Parties” ที่ทีความรู้และประสบการณ์ในระบบการวัดปริมาตรของเหลวในวงการผลิตภัณฑ์ของเหลวปิโตรเลียมสูง แต่ชั่งตวงวัดก็ต้องพบว่ามันไม่ได้เป็นเช่นนั้นเสมอไปและยังมีปัญหาอยู่เช่นเดิมเหมือนๆ ทุกภาคส่วนไม่ว่าภาคเกษตรกรรม หรือภาคครัวเรือน และเรื่องชั่งตวงวัดทั่วๆ ไป ฯลฯ แต่ไม่ต้องให้ระบุหรอกครับว่ามันเป็นเรื่องขององค์ความรู้หรือเรื่องคุณธรรม เดี๋ยวมัน..ไปกัน SO BIGGGG. แต่เรื่องนี้ถือเป็นกรณีศึกษาและสอนให้รู้ว่าทุกฝ่ายต้องอย่าหยุดและต้องกระหาย “การเรียนรู้” อยู่เสมอๆๆๆ และที่สำคัญชั่งตวงวัดห้ามกระพริบตาอย่างเด็ดขาด....ทุกงานชั่งตวงวัดตามข้อบัญญัติของกฎหมาย (Legal Metrology) งานนี้คงต้องสานต่อและต้องมีกิจกรรมกวาดบ้าน (Big Cleaning Period) กันละครับตั้งแต่นี้ไป... เท่าทีทำได้ภายใต้หน้าที่รับผิดชอบ... เรามาเริ่มกัน...
ระบบการวัดปริมาตรของเหลว (Measuring System) กับมาตรวัดปริมาตรของเหลว (Meter)
หลายคนเมื่อทำงานไปซักพักหรือระยะหนึ่ง ก็เลิกอ่านหรือทบทวนพระราชบัญญัติมาตราชั่งตวงวัด พ.ศ. 2542 และที่แก้ไขเพิ่มเติม รวมถึงอนุบัญญัติ กฎกระทรวงฯ ประกาศกระทรวงฯ ฯลฯ จะด้วยเหตุใดก็ไม่ทราบได้ แต่ในขณะเดียวกันก็มีกลุ่มคนที่อ่านและทบทวนพระราชบัญญัติมาตราชั่งตวงวัด พ.ศ. 2542 และที่แก้ไขเพิ่มเติมรวมถึงอนุบัญญัติเป็นระยะๆ เมื่ออ่านแล้วก็นึกจินตการและตีความตาม และ/หรือ บนพื้นฐานความรู้ความเข้าใจและประสบการณ์ชีวิตที่พบเจอ ส่งผลให้การนำกฎหมายไปบังคับใช้หรือพูดให้ไพเราะว่า “กำกับดูแล” พบว่าก็มีความแตกต่างกันในการทำงานของกลุ่มคนทั้ง 2 กลุ่มดังกล่าว (หรือมากกว่า 2 กลุ่ม??) แต่ทั้งนี้และทั้งนั้นก็อาจจะมีปัจจัยอื่นๆ แทรกซ้อนเราก็ไม่ทราบถึงได้เช่นกัน บางครั้งเรื่องไม่ซับซ้อนแต่ไม่ทราบว่าทำไมต้องทำให้ซับซ้อน เจ้าตัวต้องตอบใจตนเองก่อนตอบคนอื่นๆ เพราะโกหกคนอื่นได้แต่อย่าโกหกตนเองเสียจนตนเองก็เชื่อตามที่ตนเองโกหกไปด้วยละ มันจะมันและสนุกมากทีเดียวในชีวิตนี้...555 ถึงว่าสินะ......นักกฎหมาย 10 คน นั่งเรียนติดกัน จบจากคณะเดียวกัน สถาบันเดียวกัน ปีการศึกษาเดียวกัน ยังอ่านกฎหมายฉบับเดียวกัน มีเข้าใจไม่ตรงกันเลย......ด้วยเหตุนี้จึงต้องมี “สถาบันเนติบัณฑิต” สอนการตีความกฎหมายหรือเปล่าก็ไม่ทราบได้
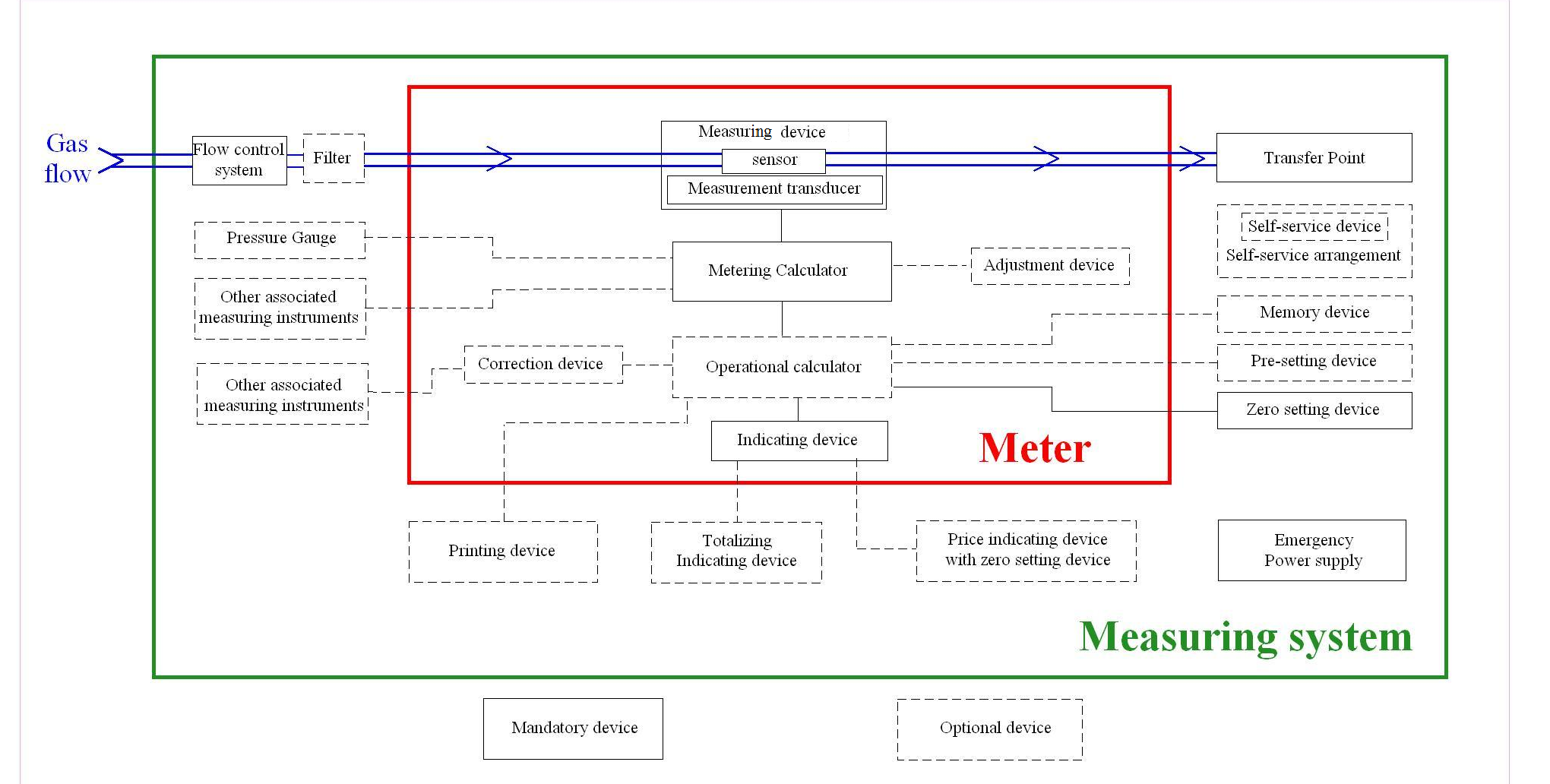
เรื่องทั้งหมดจึงกลับมาที่ “นิยาม” คือสิ่งสมมุติที่เราต้องยอมรับและตกลงร่วมกันบนกติกาเหมือนเช่นเดียวกับกติกาที่มีอยู่มากมายบนพื้นดินบนโลกใบนี้ซึ่งจะมีผลต่อไปว่าที่เราต้องเล่นกันอย่างไรหลังจากนั้น จาก OIML R 117-1 Edition 2007(E), Dynamic Measuring Systems for Liquids Other Than Water; International Organization of Legal Metrology (OIML) นิยาม “ระบบการวัดปริมาตรของเหลว (Measuring System)” กับ “มาตรวัดปริมาตรของเหลว (Meter)” ดังในรูปที่ 1 เหตุที่ยกเอาเอกสารดังกล่าวเพราะชั่งตวงวัดที่มีหลายประเทศบนโลกใบนี้ใช้เอกสารดังกล่าวเป็นตัวอ้างอิงหรือเป็นหลักหรือเป็นบทพื้นฐานในการจัดทำกฎหมายชั่งตวงวัดของแต่ละประเทศรวมถึงราชอาณจักรไทยก็ใช้เป็นเอกสารหลักในการจัดทำประกาศกระทรวงพาณิชย์ เรื่อง กำหนดชนิด และลักษณะของมาตรวัดปริมาตรของเหลว รายละเอียดของวัสดุที่ใช้ผลิต อัตราเผื่อเหลือเผื่อขาดและอายุคำรับรอง ลงวันที่ 2 ตุลาคม พ.ศ. 2562



.png)
รูปที่ 1 นิยาม “ระบบการวัดปริมาตรของเหลว (Measuring System)” กับ “มาตรวัดปริมาตรของเหลว (Meter)” และคำนิยามที่เกี่ยงข้องต่อเนื่องใน OIML R117
รูปที่ 2 นิยาม “ระบบการวัดปริมาตรของเหลว (Measuring System) กับมาตรวัดปริมาตรของเหลว (Meter)” ในประกาศกระทรวงพาณิชย์ เรื่อง กำหนดชนิด และลักษณะของมาตรวัดปริมาตรของเหลว รายละเอียดของวัสดุที่ใช้ผลิต อัตราเผื่อเหลือเผื่อขาด และอายุคำรับรอง ลงวันที่ 2 ตุลาคม พ.ศ. 2562
หลายคนคิดว่างานชั่งตวงวัดตามข้อบัญญัติของกฎหมาย ดูและกำกับเฉพาะแต่ “ตัวเครื่องชั่งตวงวัด” เท่านั้นไม่ต้องดู “ระบบการวัดฯ” งานนี้ต้องปรับตัวปรับใจให้ดีนะครับเพราะเราต้องกำกับดูแล “ระบบการวัดปริมาตรของเหลว” เพราะการทำงานร่วมกันระหว่างเครื่องชั่งตวงวัด กับอุปกรณ์ทั้งหมดรวมเป็นระบบฯต่างมีผลต่อการทำงานและการส่งมอบความเที่ยงของเครื่องชั่งตวงวัด (ในที่นี้เครื่องมาตรวัดปริมาตรของเหลว) และนี้แหละคืองานชั่งตวงวัดตามข้อบัญญัติของกฎหมายที่ต้องกำกับดูแลงานส่งมอบความเที่ยงของเครื่องชั่งตวงวัดเข้าสู่เศรษฐกิจและสังคมของราชอาณาจักรไทยเพื่อความมั่นคงของราชอาณาจักรไทย ดังนั้นหากเครื่องชั่งตวงวัดสามารถทำงานแบบ Stand Alone แล้วส่งมอบความเที่ยงได้เรื่องก็จบตรงนั้นคือเป็นเรื่องเฉพาะตัว “เครื่องชั่งตวงวัด” เช่น เครื่องชั่งสปริง เป็นต้น แต่หากเครื่องชั่งตวงวัดไม่สามารถส่งมอบความเที่ยงในการทำงานแบบ Stand Alone ได้ จะสามารถส่งมอบความเที่ยงได้ก็ต่อเมื่อต้องทำงานในรูปแบบ System งานนี้ชั่งตวงวัดก็ต้องดูทั้ง System อย่างดูแยกส่วนเฉพาะเครื่องชั่งตวงวัดนั้นเอง เช่น มาตรวัดปริมาตรของเหลว ณ Truck Loading, มาตรวัดปริมาตรน้ำมันเชื้อเพลิงตามสถานีบิการ, เครื่องชั่งรถยนต์บรรทุก เป็นต้น สำหรับผมมีหลักคิดตามนี้นะ เพราะเจอความสับสนนี้จากหลายคนและต้องตอบความถามนี้ชักบ่อยขึ้น โดยเฉพาะเครื่องชั่งตวงวัดแบบติดตรึงกับที่ตามกฎหมายบัญญัติไว้
องค์ประกอบที่สำคัญมาตรวัดปริมาตรของเหลวชนิด Positive Displacement Meter
จากนิยามในรูปที่ 1 และรูปที่ 2 จึงสรุปได้ว่าจากคำนิยามตาม OIML R117-1 กำหนดคำ “มาตรวัดปริมาตรของเหลว (Meter)” ว่า
Meter = Measuring Device; T.m.1 + Calculator + Indicating Device
= (Meter Sensor; T.s.3 + Transducer; T.t.1) + Calculator; T.c.1 + Indicating Device; T.i.1
และ “ระบบการวัดปริมาตรของเหลว (Measuring System)” คือ
Measuring System = Meter + Ancillary Devices + Additional Devices
ประเด็นของอุปกรณ์ควบคืออุปกรณ์เกี่ยวข้องโดยตรงกับผลการวัด ในขณะที่อุปกรณ์เสริมมีประเด็นในเรื่องของมีผลกระทบต่อความแม่นย่ำและความเชื่อมั่นในการวัด ดังนั้นในการพิจารณาอุปกรณ์ใดควรจัดเป็นอุปกรณ์ควบหรืออุปกรณ์เสริมก็จับหลักกันให้ดี
เราจะไม่พูดถึง “ระบบการวัดปริมาตรของเหลว (Measuring System)” แต่จะตีกรอบให้แคบลงมาและให้สอดรับกับบทความนี้ซึ่งตั้งใจยกให้เป็น “เรื่องกรณีศึกษาของมาตรวัดปริมาตรของเหลวชนิด Positive Displacement” ในแง่มุมหนึ่งเฉพาะเรื่อง “มาตรวัดปริมาตรของเหลว (Meter)” เท่านั้น ตกลงตามนี้ก่อนะ
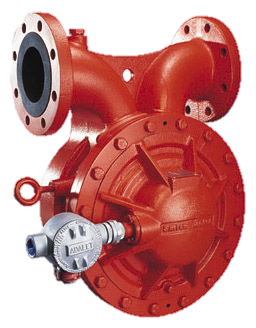
ดังนั้นจึงขอปูพื้นหลักการทำงานและองค์ประกอบหลักของมาตรวัดฯ ดังกล่าวพอเป็นสังเขปเท่านั้น เริ่มกันเลย มาตรวัดปริมาตรของเหลวชนิด Displacement Meter หรือ Positive Displacement Meter (P.D. Meters) มีรูปร่างหน้าตากันหลากหลายแต่ตัวอย่างรูปร่างหน้าตาที่เราอาจพบบ่อยในงานชั่งตวงวัดฯ ตัวอย่างหนึ่งดังในรูปที่ 3 พูดถึงหลักการทำงาน เป็นมาตรวัดปริมาตรของเหลวซึ่งได้รับการออกแบบมาเพื่อวัดปริมาตรของเหลวภายในระบบท่อโดยของเหลวในระบบท่อต้องเป็นของเหลวล้วน ต้องไม่มีอากาศ และ/หรือสิ่งใดๆที่มีสถานะของแข็ง เช่น โคลน ปนเข้ามาหรือพูดอีกในนัยหนึ่งคือต้องมีแต่ “สถานะของเหลว” เพียงสถานะเดียวเท่านั้นภายในระบบท่อและในมาตรวัดปริมาตรของเหลวขณะทำการวัดปริมาตร โดยแบ่งของเหลวในระบบปิดภายในตัวมาตรวัดฯ ออกเป็นส่วนๆที่มีค่าแน่นอนค่าหนึ่งที่เราเรียกว่า “Measuring Chamber” (ดูรูปที่ 4) จากนั้นทำการนับรวมเอาค่าปริมาตรของเหลวที่มีค่าแน่นอนแต่ละส่วนเข้าด้วยกันเป็น “ปริมาณรวม” ทั้งหมดในการวัดปริมาตรของเหลวในแต่ละครั้ง ก่อนแปลงค่าที่วัดได้เพื่อแสดงผลการวัดปริมาตรต่อไป

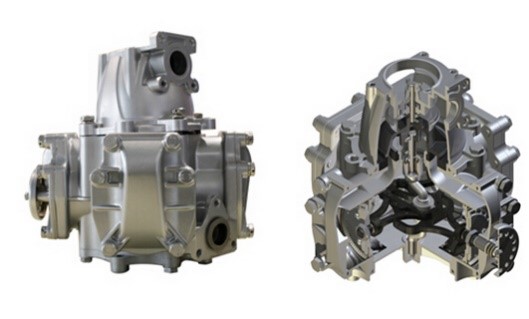
รูปที่ 3 ตัวอย่างมาตรวัดปริมาตรของเหลวชนิด Positive Displacement Meter (P.D. Meters)
แต่ในทางปฏิบัติพบว่าของเหลวภายในระบบท่อเมื่อไหลเข้ามาตรวัดฯจะไหลผ่านเข้าไปยัง “ส่วนวัดปริมาตร (Meter Sensor หรือ Measuring Element)” (ดูรูปที่ 4) ด้วยปริมาตรคงที่ค่าหนึ่งซึ่งเท่ากับปริมาตรของ “Measuring Chamber” บวกกับปริมาณส่วนที่รั่วไหล (Leakage or Slip) อีกเล็กน้อยในแต่ละช่วงชักหรือรอบการหมุนของส่วนวัดปริมาตรของเหลว ดังนั้นมาตรวัดปริมาตรของเหลวชนิด Positive Displacement Meter จึงมีจุดอ่อนคือ ปริมาณส่วนที่ไหลเล็ดรอด (Leakage or Slip) ซึ่งไม่ถูกวัดปริมาตรโดยมาตรวัดฯ (ดูรูปที่ 5 และรูปที่ 6)
ในการทำงานของมาตรวัดชนิดนี้ เนื่องจากมาตรวัดฯ PD ประกอบด้วยชิ้นส่วนกลไกเป็นจำนวนมากที่ได้รับการออกแบบให้ทำงานร่วมกัน จึงพบว่ามีการรั่วไหลเล็ดลอดของเหลวผ่านมาตรวัดฯ โดยไม่ถูกวัดปริมาณการส่งจ่ายดังกล่าวนี้เกิดจากการประกอบชิ้นส่วนต่างๆในการทำงานของส่วนวัดปริมาตรของเหลวซึ่งปกติแล้วจะมีช่องว่าง (clearances) อยู่ค่าหนึ่งของแต่ละชิ้นส่วนกลไกทำงานร่วมกันดังกล่าวอีกทั้งยังมีค่าไม่คงที่แน่นอนในขั้นตอนผลิต ดังนั้นปริมาณของเหลวที่รั่วไหลเล็ดลอดนี้จึงมีค่าไม่คงที่แน่นอนถึงแม้ว่าจะเป็นมาตรวัดฯชนิดและรุ่นเดียวกันหรือแม้แต่ชนิดและรุ่นต่างกันทั้งนี้ขึ้นอยู่กับการออกแบบและประกอบชิ้นส่วนกลไกจำนวนมากเข้าด้วยกัน ในขณะเดียวกันปริมาณการรั่วไหลเล็ดลอดดังกล่าวยังผันแปรเปลี่ยนไปขึ้นอยู่ปัจจัยที่สำคัญคือ ค่าอัตราการไหลและความหนืดของเหลวที่ทำการวัดอีกด้วย ด้วยมาตรวัดฯ PD มีชิ้นส่วนกลไกมากนี้เองจึงมีขนาดใหญ่ในสัดส่วนที่สูงเมื่อเทียบกับการใช้งานที่อัตราการไหลเพิ่มขึ้นดังนั้นขนาดใหญ่สุดที่เราจะเจอน่าจะไม่เกิน Æ 12 นิ้ว ดังนั้นในประกาศกระทรวงพาณิชย์ฯ จึงมีข้อกำหนดให้มาตรวัดปริมาตรของเหลวที่ต้องได้รับตรวจสอบให้คำรับรอง (Verification) ต้องใช้ของเหลวชนิดเดียวกับของเหลวที่ต้องการมาตรวัดฯ นำไปใช้งานจริงนั้นเอง ซึ่งรวมถึงมาตรวัดชนิด PD ด้วยเช่นกัน ขอให้ระวังด้วย....
จากคำนิยามตาม OIML R117-1 องค์ประกอบที่สำคัญมาตรวัดปริมาตรของเหลวชนิด Positive Displacement Meter ได้แก่
1. ส่วนวัดปริมาตร (Meter Sensor) หรือ Measuring Element นับว่าเป็นหัวใจของส่วนทำงานของมาตรวัดปริมาตรของเหลวชนิด Positive Displacement Meter โดยมีส่วนกลไกจะแบ่งปริมาตรของเหลวออกเป็นส่วนๆ พร้อมกับการเคลื่อนที่ในแต่ละรอบการหมุนภายในห้องวัด (Measuring Chamber) ด้วยความแม่นยำเมื่อของเหลวไหลผ่านมาตรวัดฯ (ดูรูปที่ 4)
1.1. ส่วนกลไก ถือเป็นส่วนที่มีการเคลื่อนที่ขณะทำหน้าที่ ลักษณะรูปแบบชิ้นส่วนกลไกถูกออกแบบแตกต่างกันไป เช่น Rotary Van, Bi-Rotor, Oval Gears เป็นต้น เพื่อให้ทำหน้าที่แบ่งปริมาตรของเหลวออกเป็นส่วนๆ อย่างแม่นยำมากที่สุดเท่าที่ทำได้พร้อมกับเคลื่อนที่ไป ดังนั้นในแต่ละรอบการเคลื่อนที่ (หมุน) ของส่วนกลไกดังกล่าวภายในห้องวัดจะได้ค่าปริมาตรคงที่ค่าหนึ่งบวกด้วยปริมาตรที่ไหลเล็ดรอด บางครั้งส่วนกลไกนี้จะถูกอีกชื่อหนึ่งว่า “โรเตอร์ (Rotor)” ดูรูปที่ 5
1.2. ห้องวัด (Measuring Chamber) ภายในห้องวัดนี้จะบรรจุด้วยส่วนกลไก โดยขนาดและวัสดุของห้องวัดต้องถูกออกแบบให้ใช้กับของเหลวที่ต้องการวัดโดยไม่มีผลกระทบทั้งในเรื่องการกัดในเชิงกลและเชิงเคมี, อีกทั้งต้องมีความหนาของผนังห้องวัดที่แข็งแรงสามารถทนทานต่อความดันของเหลวขณะทำงาน (operating pressure) และ ฯลฯ ทั้งโดยตรงและโดยอ้อม ที่สำคัญต้องลดปริมาตรการไหลเล็ดรอดระหว่างช่องว่างของชิ้นส่วนกลไกและห้องวัดให้น้อยที่สุดเนื่องจากการไหลเล็ดรอดของของเหลวที่ไม่ถูกวัดปริมาตรถือเป็นจุดด้อยของมาตรวัดปริมาตรของเหลวชนิด Positive Displacement เป็นปัจจัยสำคัญในการทำงาน
รูปที่ 4 ส่วนวัดปริมาตร (Meter Sensor หรือ Measuring Element)
โดยปกติแล้วเราจะพบการออกแบบตัวเรือนมาตรวัดปริมาตรของเหลวชนิด Positive Displacement Meter 2 ลักษณะหลักๆ คือ ตัวเรือนชั้นเดียว (Single Case) หรือตัวเรือน 2 ชั้น (Double Case) โดย
มาตรวัดฯ ลักษณะตัวเรือนชั้นเดียว (Single Case Meters) ผนังตัวเรือนภายนอกของตัวมาตรวัดทำหน้าที่เป็นผนังของห้องวัด (Measuring Chamber) ไปในคราวเดียวกัน ดังนั้นเมื่อตัวเรือนภายนอกซึ่งต่อเชื่อมต่อเข้ากับระบบท่อขนส่งของเหลว หน้าแปลนของตัวเรือนภายนอกจึงเชื่อมต่อเข้ากับระบบท่อทั้งด้านทางเข้าและทางออกมาตราวัดฯส่งผลให้ตัวเรือนภายนอกของมาตรวัดฯ ต้องทำหน้าที่รับแรงหรือความเค้น (Stress) ซึ่งส่งผ่านมาจากระบบท่อโดยตรงอีกหน้าที่หนึ่ง และถ้าหากมีแรงกระทำดังกล่าวจากระบบท่อทางเข้าและทางออกต่อตัวเรือนภายนอกมาตรวัดฯ มากจนระดับตัวเรือนภายนอกมาตรวัดฯ เสียรูปทรงยิ่งมีผลกระทบต่อการทำงานและความเที่ยงของมาตรวัด ฯ ทันที บางคนอาจประเมินว่าสภาพแรงบดอัดและแรงดึงของระบบท่อกระทำต่อมาตรวัดฯ ไม่น่าจะมาก ก็ขอตอบว่าแรงอัดและแรงดึงจากระบบท่อจะมากน้อยขึ้นอยู่กับการออกแบบระบบท่อ โดยเฉพาะระบบท่อที่ต้องตากแดด ท่อมันจะยืดขยายเช่นเดียวกับรางรถไฟเลยทีเดียว และนี้คืออีกหลายเหตุผลที่มาตรวัดฯ ไม่สามารถทำงานในรูปแบบ Stand Alone ได้ เราจึงต้องคำนึงปัจจัยที่มีผลต่อการส่งมอบความเที่ยงของมาตรวัดฯ ภายในระบบการวัดปริมาตร โดยปกติแล้วมาตรวัดฯ ที่ออกแบบให้มีตัวเรือนชั้นเดียวจะมีขนาดไม่เกิน 6 นิ้ว
|
|
|
|
|

Bi-Rotor
|
.jpg)
Lobe
|

Gear
|
|
|
|
|
|
Sliding Van
|
รูปที่ 5 ส่วนกลไกภายในห้องวัดแบบต่างๆของมาตรวัดปริมาตรของเหลวชนิด Positive Displacement Meter (P.D. Meters)
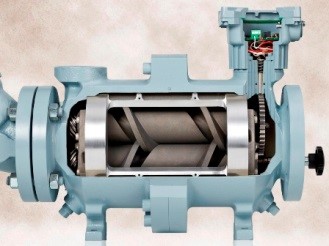
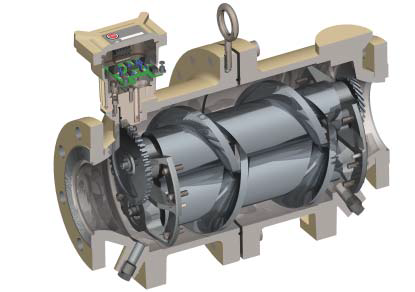
มาตรวัดฯ ลักษณะตัวเรือน 2 ชั้น (Double Case Meters) แบบ Sliding Van ดูรูปที่ 5 นิยมใช้ออกแบบให้กับมาตรวัดปริมาตรของเหลวชั้นความเที่ยงสูงระดับ “มาตรวัดแบบมาตรา (Master Meter)” ซึ่งจะแยกห้องวัด (Measuring Chamber) ให้อิสระออกจากตัวเรือนภายนอกของตัวมาตรวัดเพื่อลดผลกระทบจากปัจจัยภายนอกที่อาจมีผลต่อการทำงานของส่วนวัดปริมาตรภายในห้องวัดรวมถึงตัวห้องวัดด้วยเช่นกัน ทั้งนี้เพื่อให้มาตรวัดฯ ส่งมอบผลการวัดได้ความเที่ยงสูงสุด การออกแบบให้มีตัวเรือนของมาตรามี 2 ชั้นนั้นเพื่อวัตถุประสงค์หลัก 2 อย่างด้วยกันคือ
- รักษาความสมดุลของความดัน (Pressure Balance) เมื่อความดันของเหลวกระทำต่อผนังห้องวัดเกิดสมดุล การบิดเบี้ยวซึ่งเกิดจากความดัน (Pressure-generated Distortion) กระทำต่อชิ้นส่วนกลไกภายในห้องวัดจะมีน้อยมาก ผลกระทบต่อช่องว่างวิกฤต (Critical Clearance) ภายในมาตรวัดฯ (ดูรูปที่ 6) ซึ่งมีผลต่อความแม่นย่ำการวัดของมาตรวัดโดยก่อให้เกิดการไหลเล็ดรอด (Slippage Flow) แทบไม่มีหรือมีน้อยมาก
- การลดความเค้น (Stress Absorption) ที่กระทำต่อมาตรวัดฯ ปกติแล้วในระบบท่อส่งจ่ายของเหลวจะมีความเค้น (Stress) ซึ่งเกิดจากหลายปัจจัยด้วยกัน เช่น การขยายตัวของท่อเนื่องจากความร้อนจากแสงแดด เป็นต้น เมื่อติดตั้งมาตรวัดเข้ากับระบบท่อดังกล่าวหากมาตรวัดมีตัวเรือนชนิด 2 ชั้น (Double Case) หน้าแปลนท่อของตัวเรือนภายนอกสุดจะเป็นตัวรองรับและลดความเค้นซึ่งส่งผ่านมาจากระบบท่อไม่ให้ส่งผลไปยังตัวเรือนชั้นในซึ่งเป็นห้องวัดของส่วนวัดปริมาตร ด้วยเหตุนี้ช่องว่างวิกฤต (Critical Clearance) จึงยังคงมีค่าคงที่ไม่ว่าความดันภายในระบบท่อเปลี่ยนแปลงหรือระบบท่อที่มาตรวัดฯ ติดตั้งอยู่มีการขยายหรือหดตัว (ในระดับหนึ่ง...)
รูปที่ 6 การไหลเล็ดรอดผ่านช่องว่างระหว่างส่วนกลไกกับผนังห้องวัดของมาตรวัดปริมาตรของเหลวชนิด Positive Displacement Meter (P.D. Meters) มีส่วนกลไกแบบ Sliding Van
2. ทรานสดิวเซอร์ (Transducer; T.t.1) เราต้องพบกับคำ 3 คำต่อไปนี้บ่อยขึ้นอีกทั้งเป็นคำ 3 คำที่พบว่ามีความเข้าใจสับสนมาตลอดส่วนจะเสียหายมากน้อยเพียงใดอันนี้ไม่ทราบได้ 3 คำที่ว่านั้นคือ “Sensor”, “Transducer” และ “Transmitter” จะขอยกตัวอย่างในกรณีเครื่องชั่งไม่อัตโนมัติพบว่าที่ผ่านมามีคนมากน้อยเท่าใดไม่ทราบได้เข้าใจว่า “Load Transmitter” คือ “Load Cell” ซึ่งมันจะมึนและเข้าใจผิด ดังนั้นจึงขอให้กลับไปอ่านคำนิยามใน OIML R76 ให้เข้าใจเสียก่อนเนื่องจาก Load Transmitter ในกรณีเครื่องชั่งฯ นั้นคือกลไกที่ส่งผ่านแรงต่อจากชิ้นส่วนหนึ่งไปยังอีกชิ้นส่วนการทำงานอื่น ดังในรูปที่ 7 ส่วนคำว่า “Load Measuring Device” นั่นแหละถึงจะเป็น “Load Cell” ส่วนจะเป็น Analog Loadcell หรือ Digital Loadcell ก็ว่ากันไป ถ้าอย่างไรก็ขอให้ทำความเข้าใจคำนิยามดังกล่าวกันเองนะครับ ถ้าเป็นไปตามที่ว่าก็ขอให้ปรับปรุงแก้ไข แต่ถ้าไม่ใช่...เค้าขอโทษ.....
รูปที่ 7 การเปรียบเทียบส่วนประกอบพื้นฐานของเครื่องชั่งแบบกลไก (Mechanical), เครื่องชั่งไฮบริด (Hybrid) และเครื่องชั่งอิเล็คทรอนิค (Electronic) , OIML R76
เรามาแยกแยะนิยามของ 3 คำที่มักสับสนดังนี้
(1.) เซนเซอร์ (Sensor) เป็นอุปกรณ์ตรวจจับ, รับรู้ หรือบ่งบอกสถานะ การเปลี่ยนแปลงปริมาณทางกายภาพ (Physical Quantity) ของตัวแปรต่างๆ โดยปริมาณในการวัดของการตรวจจับ รับรู้ หรือบ่งบอกสถานะของอุปกรณ์เหล่านั้นในค่าปริมาณทางกายภาพ เช่น ค่าอุณหภูมิ (Temperature), ค่าความชื้น (Humidity), ปริมาณอัตราการไหล (Flow Rates), ตำแหน่งการเคลื่อนที่ (Linear Displacement), ค่าความดัน (Pressure) เป็นต้น และยังมีเซนเซอร์แบบอื่นๆ เช่น โฟโต้เซนเซอร์ (Photo Electric Sensor), พร็อกซิมิตี้เซนเซอร์ (Proximity Sensor) เพื่อบ่งบอกสถานะทำงาน เช่น สถานะ ON-OFF เป็นต้น
(2.) ทรานสดิวเซอร์ (Transducer) ทำหน้าที่ เปลี่ยนแปลงพลังงานจากรูปแบบหนึ่งไปเป็นพลังงานอีกรูปแบบหนึ่ง โดยรูปแบบพลังงานที่จะถูกแปลงไปอยู่ในพลังงานอีกรูปแบบหนึ่งดังกล่าวนั้น ปริมาณทางกายภาพ (Physical Quantity) เป็นหนึ่งในนั้น เช่น อุณหภูมิ (Temperature), ความชื้น (Humidity), ความดัน (Pressure), Electrical, Chemical, Mechanical, Thermal energy, Electromagnetic Energy รวมถึงแสง (Light) , อัตราการไหล (Flow Rates), แรงตึงเครียด (Strain) เป็นต้น พลังงานที่ยกตัวอย่างดังที่กล่าวจะถูกเปลี่ยนแปลงไปเป็นพลังงานในอีกรูปแบบที่ต่างออกไปเพื่อประโยชน์ในการใช้งานต่อไป ตัวอย่างเช่น แรงดันไฟฟ้า (Voltage), กระแสไฟฟ้า (Current), ความร้อน (Thermal), แสงสว่าง (Light), ความต้านทาน (Resistance) เป็นต้น แต่โดยส่วนใหญ่แล้วทรานสดิวเซอร์จะแปลงพลังงานตั้งต้นที่อยู่ในรูปแบบต่างๆ ให้เป็นพลังงานไฟฟ้า (ดูรูปที่ 8) เราจะพบว่าเครื่องมืออุปกรณ์ส่วนนี้อาจอยู่ในรูป Sensor โดดๆ หรือรวมเอา Sensor เข้ากับทรานสดิวเซอร์แล้วเรียกรวมกันเป็น “ทรานสดิวเซอร์ (Transducer)” ก็ได้ อาจจะกล่าวได้ว่า “ทราสดิวเซอร์ก็คือเซนเซอร์ แต่เซนเซอร์ไม่ใช่ทรานสดิวเซอร์”
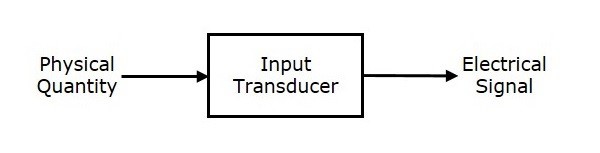
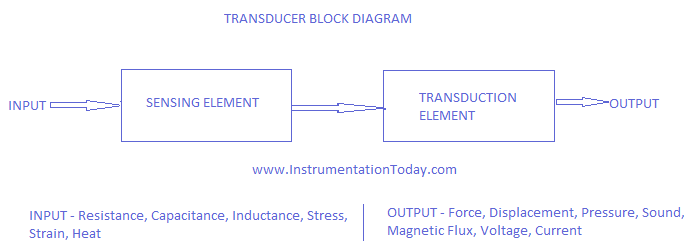
รูปที่ 8 Input และ Output ของทรานสดิวเซอร์ (Transducer)
การประยุกต์การใช้งานทรานสดิวเซอร์ (Transducer Applications) การแบ่งประเภทประยุกต์การใช้งานทรานสดิวเซอร์ในที่นี้อยู่บนพื้นฐานของค่าตัวแปรทางไฟฟ้า (The Electric Parameter) ที่ถูกนำมาใช้และหลักการทำงานที่เกี่ยวข้อง ซึ่งแบ่งออก 2 ประเภทคือ
ก. Passive Type Transducers เป็นทรานสดิวเซอร์ที่ต้องใช้แหล่งพลังงานภายนอกใด ๆ เพื่อใช้ในการผลิตสัญญาณด้านทางออก (Output) ของทรานสดิวเซอร์ ซึ่งเราจะพบบ่อยในงานชั่งตวงวัดตามข้อบัญญัติของกฎหมาย เช่น Analog Load Cell เมื่อมีแรงกระทำบน Load Cell จำเป็นต้องมีแรงดันไฟฟ้ากระแสตรงกระตุ้นวงจร Wheatstone Bridge ของ Strain Gauges บน Load Cells เพื่อให้สัญญาณด้านทางออกของ Load Cells ให้ค่าเป็นแรงดันไฟฟ้าด้านทาองออกที่มีความสัมพันธ์กับแรงที่กระทำบน Load Cells เป็นต้น Passive Type Transducers ที่อาจเจอได้แก่
1) Resistance Variation Type ตัวอย่างเช่น Resistance Strain Gauge, Resistance Thermometer, Resistance Hygrometer, Hot Wire Meter, Thermistor, Potentiometer Type
2) Capacitance Variation Type ตัวอย่างเช่น Variable Capacitance Pressure Gauge, Dielectric Gauge, Capacitor Microphone
3) Inductance Variation Type ตัวอย่างเช่น Eddy Current Transducer, Variable Reluctance Type, Proximity Inductance Type, Differential Transformer, Magneto strictive Transducer
4) Voltage and Current Type ตัวอย่างเช่น Photo-emissive Cell, Hall Effect, Ionization Chamber
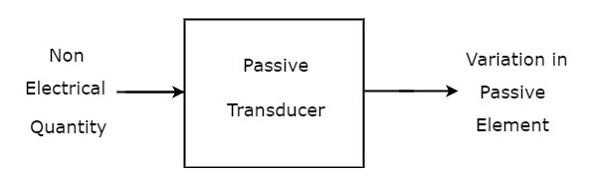
รูปที่ 9 Passive Type Transducers
ข. Active Type Transducers เป็นทรานสดิวเซอร์ที่ไม่ต้องใช้แหล่งพลังงานภายนอกใด ๆ ในการผลิตสัญญาณด้านทางออก (Output) ของทรานสดิวเซอร์ จึงสามารถทำให้มีขนาดเล็ก ในอนาคตคงมาแรงก็ต้องเตรียมตัวศึกษากันไว้ ตัวอย่างเช่น
Piezoelectric Type – เมื่อแรงภายนอกกระทำต่อ a quartz crystal จะก่อให้เกิดการเปลี่ยนแปลงแรงดันไฟฟ้าที่เกิดขึ้นบนผิวหน้าสัมผัส การเปลี่ยนแปลงแรงดันไฟฟ้าดังกล่าวจะถูกวัดในลักษณะที่สอดคล้องกับค่าความดังของเสียงหรือการสั่นสะเทือนที่วัดอยู่
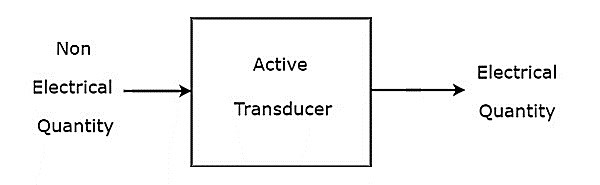
รูปที่ 10 Active Type Transducers
(3.) ทรานสมิตเตอร์ (Transmitter) คำศัพท์ตัวที่ 3 ทรานสมิตเตอร์ทำหน้าที่ในการแปลงสัญญาณไฟฟ้าด้านทางออกของเซนเซอร์หรือทรานสดิวเซอร์ให้เป็นสัญญาณมาตรฐาน (สัญญาณนิวแมติกส์และสัญญาณทางไฟฟ้า) จากนั้นส่งสัญญาณดังกล่าวออกทางด้านเอาต์พุตของทรานสมิตเตอร์ เช่น สัญญาณไฟฟ้าอนาล็อกมาตรฐานด้านเอาต์พุตของทรานสมิตเตอร์ 0 - 10 Vdc หรือ 4 - 20 mA เป็นต้น สัญญาณมาตรฐานที่ออกจากทรานสมิตเตอร์จะถูกนำไปใช้งานโดยอาจส่งไปยังส่วนควบคุม (Control Device), ส่วนประมวลผล (Calculator), หรือส่วนแสดงค่า (Indicating Device) ที่อยู่ห่างไกลออกไปจากเซนเซอร์หรือทรานสดิวเซอร์ แต่ก่อนที่ทรานสมิตเตอร์ (Transmitter) ส่งสัญญาณมาตรฐานออกทางด้านเอาต์พุตออกไปนั้น การทำงานภายในทรานสมิตเตอร์อาจทำการปรับปรุงสัญญาณที่รับเข้ามาก่อนก็ได้ซึ่งโดยทั่วไปลักษณะของปรับปรุงสัญญาณนั้นรวมถึง การขยายสัญญาณ (Amplification), Isolation, Linearization และกรองสัญญาณ (Filtering) ก่อนส่งไปยังส่วนประมวลผลและส่วนแสดงค่าต่อไป (ดูรูปที่ 12)
รูปที่ 11 คำว่า “Meter” สำหรับมาตรวัดก๊าซ (OIML R139-1)
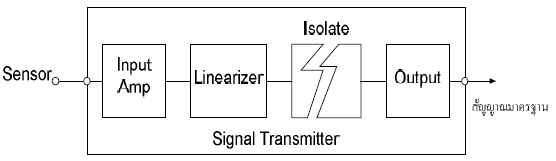
รูปที่ 12 ตัวอย่างขั้นตอนทำงานของทรานสมิตเตอร์ (Transmitter) ในการแปลงสัญญาณทางไฟฟ้าทางด้านเอาต์พุตที่ได้จากทรานสดิวเซอร์ (Transducer) ให้เป็นสัญญาณมาตรฐาน
แต่ทั้งทรานสดิวเซอร์และทรานสมิตเตอร์ต่างทำหน้าที่แปลงสัญญาณจากพลังงานรูปแบบหนึ่งไปยังพลังงานอีกรูปแบบหนึ่งเป็นสัญญาณด้านทางออก เราพอแบ่งทรานสมิตเตอร์ออกตามรูปแบบสัญญาณมาตรฐานทางด้านเอาต์พุตของทรานสมิตเตอร์เป็น 2 ประเภทได้แก่ สัญญาณนิวแมติกส์และสัญญาณทางไฟฟ้า
(3.1.) สัญญาณนิวแมติกส์ (Pneumatics Signal) เป็นสัญญาณมาตรฐานที่อยู่ในรูปของ “ความดันลม” โดยใช้ความดันของลมในการควบคุมกระบวนการทำงานใดๆ ตัวอย่างสัญญาณมาตรฐานชนิดนิวแมติกส์ ได้แก่ 3 - 15 psi (BS), 0.2 - 1 bar (SI) และ 0.2 - 1 kg/cm2 (Metric) เป็นต้น
(3.2.) สัญญาณทางไฟฟ้า (electrical signal) เป็นสัญญาณมาตรฐานที่อยู่ในรูปของแรงดันไฟฟ้า และ/หรือ กระแสไฟฟ้า แบ่งออกเป็น 2 ลักษณะ ได้แก่ แรงดันไฟฟ้า 1 - 5 V กระแสไฟฟ้า 4 - 20 mA และ แรงดันไฟฟ้า 0 - 10 V กระแสไฟฟ้า 0 - 100 mA เป็นต้น ดังนั้นสัญญาณไฟฟ้ามาตรฐานแบบ Analog เป็นสัญญาณมาตรฐานมีด้วยกัน 2 ชนิดที่เราจะพบบ่อยในงานชั่งตวงวัดตามข้อบัญญัติของกฎหมาย (Legal Metrology) งานชั่งตวงวัดเรานั้นแหละ คือ
ก. สัญญาณกระแสไฟฟ้ามาตรฐาน เป็นการส่งสัญญาณในรูป “กระแสไฟฟ้า” ของไฟฟ้ากระแสตรง (DC. Current) มาตรฐานที่นิยมใช้คือ 4 - 20 mA หมายความว่า เมื่อค่าวัดเป็น 0% เท่ากับไฟฟ้ากระแสตรง 4 mA และค่าวัดเป็น 100 % เท่ากับไฟฟ้ากระแสตรง 20 mA และค่าวัดซึ่งอยู่ในช่วง 0 - 100 % จะสัมพันธ์เป็นเชิงเส้นกับไฟฟ้ากระแสตรง 4 - 20 mA ให้ทำ Interpolation เอาเองนะ
ข้อดีของการส่งสัญญาณไฟฟ้ากระแสตรงในรูปของค่า “กระแสไฟฟ้า” คือ สามารถส่งสัญญาณไปได้ระยะไกลๆ ความต้านทานของสายส่งสัญญาณไฟฟ้าจะไม่ทำให้ค่าวัดกระแสไฟฟ้าผิดพลาด และการถูกสัญญาณรบกวนจะน้อยกว่าเมื่อเทียบกับการส่งสัญญาณเป็นค่า “แรงดันไฟฟ้า” นอกจากสัญญาณไฟฟ้ามาตรฐาน 4 - 20 mA แล้วยังมีมาตรฐานแบบอื่นอีกแต่คนนิยมใช้น้อย เช่น 0 - 20 mA, 10 - 50 mA, 0 - 1 mA
ข. สัญญาณแรงดันไฟฟ้ามาตรฐาน เป็นการส่งสัญญาณในรูป “แรงดันไฟฟ้า” ของไฟฟ้ากระแสตรง (DC Voltage) มาตรฐานที่นิยมใช้คือ 1 - 5 Vdc หมายความว่า เมื่อค่าวัดเป็น 0% เท่ากับ แรงดันไฟฟ้า 1 V และค่าวัด เป็น 100 % เท่ากับแรงดันไฟฟ้า 5 V การใช้สัญญาณมาตรฐานแบบแรงดันไฟฟ้านี้ไม่เหมาะกับการส่งสัญญาณระยะทางไกลๆ เนื่องจากความต้านทานของสายสัญญาณไฟฟ้าจะทำให้การวัดค่าแรงดันไฟฟ้าปลายสายส่งสัญญาณผิดไปเมื่อเทียบกับค่าแรงดันไฟฟ้าด้านทางออกทรานสมิตเตอร์ อีกทั้งสัญญาณแรงดันไฟฟ้ามาตรฐานดังกล่าวมักถูกบกวนสัญญาณได้ง่ายกว่าเมื่อเทียบกับสัญญาณกระแสไฟฟ้ามาตรฐาน ดังนั้นสัญญาณแรงดันไฟฟ้ามาตรฐานนี้จึงเหมาะกับการส่งสัญญาณระยะทางใกล้ แต่การส่งสัญญาณแรงดันไฟฟ้ามาตรฐานดังกล่าวก็มีข้อดีเช่นกันนั้นคือสามารถต่อเข้ากับอุปกรณ์รับสัญญาณปลายทางได้หลากหลายชนิดและรูปแบบเนื่องจากสะดวกในการติดตั้งและมีผู้ผลิตได้ผลิตอุปกรณ์มารองรับด้วยวัตถุประสงค์การประยุกต์ใช้งานมากมาย นอกจากสัญญาณแรงดันไฟฟ้ามาตรฐาน 1 - 5 V แล้วยังมีมาตรฐานอื่นแต่นิยมใช้น้อย คือ 0 - 10 V, 0 - 5 V, 0 - 10 mV
ทรานสดิวเซอร์ (Transducer) ในกรณีมาตรวัดปริมาตรของเหลวนี้จึงเป็นส่วนทำหน้าที่ในการแปลงค่าปริมาตรที่ถูกวัดได้จากส่วนวัดปริมาตร (Measuring Element หรือ Meter Sensor) ให้เป็นค่าสัญญาณของพลังงานไฟฟ้าหรือสัญญาณไฟฟ้าพัลส์อยู่ในรูปของความถี่ จึงถือเป็น “Passive Transduce” จากนั้นจึงส่งสัญญาณไฟฟ้าพัลส์ในรูปความถี่ (ในกรณีทั่วไป) ไปคำนวณผลในส่วนประมวลผล (Calculator) และส่วนแสดงผลค่าปริมาตรที่วัดได้ Indicating Device ในทางปฏิบัติผู้ผลิตจะออกแบบการทำงานร่วมกันระหว่าง Meter Sensor, Transducer และ Calculator ทั้ง 3 ส่วนในรูปแบบที่แตกต่างกันไป ตัวอย่างเช่น อาจออกแบบให้ส่วนวัดปริมาตร (Meter Sensor) บูรณาการทำงานร่วมกันกับทรานสดิวเซอร์ ให้จบไปในตัวเลยจากนั้นปล่อยสายสัญญาณด้านทางออกทิ้งไว้ เพื่อผู้ใช้งานสามารถนำไปใช้เชื่อมต่อกับอุปกรณ์ปลายทางอื่นๆเพื่อนำสัญญาณไฟฟ้าพัลส์หรือสัญญาณความถี่ด้านทางออกดังกล่าวไปใช้งานได้ทันทีเพื่อตอบสนองวัตถุประสงค์ที่แตกต่างกันของผู้ใช้งาน ดังในรูปที่ 13 หรือผู้ผลิตอาจออกแบบให้อุปกรณ์ทั้ง 3 ส่วนแยกเป็นชิ้นๆอิสระต่อกันโดยแต่ละส่วนทำหน้าที่ Meter Sensor, Transducer และ Calculator จากนั้นสามารถนำส่วนดังกล่าวมาประกอบให้ทำงานร่วมกันเป็นส่วนเดียวกันหรือเป็น “มาตรวัดปริมาตรของเหลว (Meter)” เสมือนการต่อ “LEGO” (ดูรูปที่ 16) ดังนั้นในการออกแบบแยกส่วนการทำงานอิสระต่อกันแต่สามารถเชื่อมต่อกันได้ดังกล่าวนั้นจะสามารถเกิดขึ้นได้ก็ต่อเมื่อเกิดความร่วมมือ (Collaboration) และการทำงานแบบ LEGO หรือเป็น MODULE จากผู้ผลิตที่เกี่ยวข้องเพื่อให้แน่ใจและประกันว่าแต่ละอุปกรณ์ชิ้นส่วนเมื่อทำงานต่อเชื่อมกันแล้วต้องทำงานร่วมกันสอดคล้องและสอดรับกันได้เพื่อส่งมอบผลการวัดปริมาตรของเหลวที่มีความเที่ยงตรง ยกตัวอย่างเช่น Meter Sensor ผลิตโดยบริษัท A , Transducer ผลิตโดยบริษัท B และ Calculator กับ Indicating Device ผลิตโดยบริษัท C แต่บริษัท D เป็นผู้ขายมาตรวัดปริมาตรของเหลว (Meter) เป็นคนรวมเอาสินค้าที่ผลิตโดยบริษัท A, บริษัท B และบริษัท C มาประกอบร่างร่วมกันเป็นมาตรวัดปริมาตรของเหลวแล้วขายตัวมาตรวัดฯ ในนามบริษัท D เป็นต้น ดังนั้นภายใต้ระบบการตรวจสอบต้นแบบเครื่องชั่งตวงวัด (W&M Pattern Approval) บริษัท D ต้องเป็นผู้ยื่นเครื่องชั่งตวงวัดดังกล่าวในการตรวจสอบต้นแบบ (Pattern Approval) มาตรวัดปริมาตรของเหลวทั้งเครื่องซึ่งพบว่าต้องใช้เงินและเวลาในการดำเนินการตรวจสอบต้นแบบนาน ดังนั้นหากผู้ผลิต และ/หรือ ผู้ประกอบเครื่องชั่งตวงวัดประสงค์ปรับปรุงรุ่นเครื่องชั่งตวงวัดให้ทันต่อการเปลี่ยนแปลงของเทคโนโลยี และ/หรือ ความต้องการของลูกค้า ผู้ผลิต และ/หรือ ผู้ประกอบการฯ ต้องใช้ระยะเวลาในการปรับเปลี่ยนผลิตภัณฑ์เครื่องชั่งตวงวัดเป็นเวลานานหรือล่าช้าไม่ทันใจในการผลิตเครื่องชั่งตวงวัดออกในคราวลละปริมาณมาก (Mass Production) ส่งผลให้การตรวจสอบต้นแบบเครื่องชั่งตวงวัดในระบบเดิมเป็นตัวถ่วงระบบการค้าเสรีของโลกซึ่งมีผลประโยชน์มหาศาล จึงมีการปรับตัวในงานชั่งตวงวัดตามข้อบัญญัติของกฎหมายโดยทำการปรับเปลี่ยนจากการตรวจสอบต้นแบบเครื่องชั่งตวงวัดทั้งตัวในกรณีนี้ก็คือ “มาตรวัดปริมาตรของเหลว” เป็นระบบแยกตรวจสอบประเมินชิ้นส่วนมาตรวัดฯ แยกออกเป็น Module เช่น Meter Sensor Module กับ Transducer + Calculator Module เป็นต้น เมื่อแต่ละ Module ผ่านการตรวจประเมินคราวนี้หากผู้ผลิตฯ และ/หรือ ผู้ประกอบฯ นำแต่ละ Modules มาประกอบร่างเป็นมาตรวัดปริมาตรของเหลว (Meter) ก็คาดว่าจะได้มาตรวัดปริมาตรของเหลว (Meter) ที่เป็นไปตามข้อกำหนดของ OIML หรืองานชั่งตวงวัดตามข้อบัญญัติของกฎหมาย (Legal Metrology) ของประเทศที่เจริญแล้วและเป็นประเทศที่ผลิตชิ้นส่วนอุปกรณ์เครื่องชั่งตวงวัดดังกล่าว.... มันก็เท่านั้นเอง คนใหญ่คนโต คนที่มีผลประโยชน์เป็นผู้คุมเกมส์และวางเส้นทางให้คนอย่างเราซึ่งเป็นประเทศเล็กๆ คนเล็กๆ เดินตามคนใหญ่คนโตกันต่อไป.... ตัวอย่างที่ผ่านมาเราจึงเห็นว่าเป็นการทำงานในรูปแบบของการนำชิ้นส่วนมาต่อกันเสมือนของเล่นที่มีชื่อว่า “LEGO” (หากใครไม่ทราบว่าของเล่นนี้มีหน้าตาอย่างไร ง่ายนิดเดียวครับ ค้นในอากู๋ Google ครับ) ได้เป็นมาตรวัดปริมาตรของเหลว (Meter) ผลกระทบในรูปแบบการทำงานนี้เองจะกระทบต่อการทำงานของคนในชั่งตวงวัดที่ต้องศึกษาหาความรู้เพราะเราต้องรู้ว่าเวลาผู้ประกอบการนำอุปกรณ์แต่ละชิ้นส่วนมาต่อเชื่อมกันให้ทำงานร่วมกันเป็นเครื่องชั่งตวงวัดนั้น อุปกรณ์แต่ละชิ้นที่นำมาประกอบเพื่อให้ทำงานร่วมกันนั้นมันทำงานสอดคล้องและสอดรับในระดับที่เหมาะสมกับงานชั่งตวงวัดตามข้อบัญญัติของกฎหมายซึ่งต้องดูแลเครื่องชั่งตวงวัดที่ใช้งานกับสาธารณะชนของราชอาณาจักรไทย ซึ่งประเด็นนี้ถือเป็นข้อต่อของระบบฯ ที่ประเทศเจริญแล้วกำหนดมาตามที่กล่าวไว้ข้างต้น และยังเป็นข้อต่อของระบบที่ถือเป็นจุดอ่อนมากที่สุดสำหรับประเทศปลายทางของอุปกรณ์แต่ละชิ้นส่วนดังกล่าว อย่างเช่น ราชอาณาจักรไทย สิครับ..... เพราะมันต้องใช้บุคลากรที่มีความรู้ความสามารถที่แท้จริง บุคคลใดหรือบริษัทใดต้องมีความรู้ความสามารถเพียงพอในการเลือก Meter Sensor, Transducer, Calculator และ Indicating Device ให้ทุกส่วนทำงานสอดคล้องและสอดรับกันอย่างแท้จริงๆ ไม่ใช่มั่วๆๆ และมั่วๆๆ จับแพะชนแกะเมื่อใดระบบงานชั่งตวงวัดตามข้อบัญญัติของกฎหมายของราชอาณาจักรไทยจะอยู่ภายใต้สภาวะสุ่มเสี่ยงต่อเศรษฐกิจ, สังคมและความมั่นคงทันที อีกทั้งทิ้งปัญหาไว้มากมาย ถ้าไม่มีใครรู้เรื่อง...มันก็แล้วไป..ปล่อยผ่านไป... ดังนั้นคนชั่งตวงวัดจึงต้องมั่นเรียนรู้ให้มากเข้าไว้เพื่อดูแลราชอาณาจักรไทยและส่งมอบให้คนรุ่นต่อไป และนี้คือสาเหตุหนึ่งที่ต้องนั่งจิ๋มคีย์บอร์ดครับเพราะเราเจอปัญหาทั้งเครื่องชั่งไม่อัตโนมัติและมาตรวัดปริมาตรของเหลว เลยต้องเขียนเป็นกรณีศึกษาทั้ง 2 เรื่อง เรื่องนี้เป็นเรื่องที่ 2..... โอเค... กลับมาเข้าเนื้อหาต่อ ดังนั้นรูปแบบการจับคู่อุปกรณ์แต่ละส่วนให้เข้ามาทำงานร่วมกันเท่าที่เจอ ตอนนี้มี 2 รูปแบบคือ
รูปแบบการทำงานร่วมระหว่างทรานสดิวเซอร์ (Transducer) กับส่วนประกอบหลักอื่น
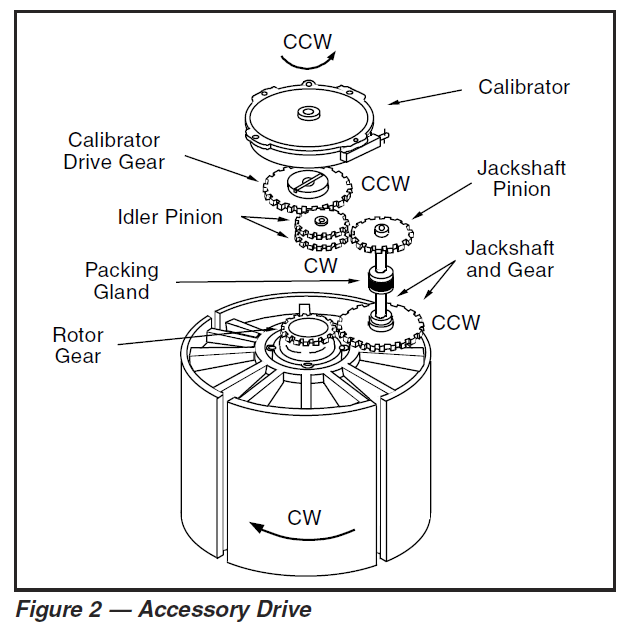
2.1. รูปแบบ ส่วนวัดปริมาตร (Meter Sensor) ทำงานร่วมกันกับทรานสดิวเซอร์ (Transducer) เป็นส่วนเดียวกัน ภายในตัวเรือนมาตรวัดฯ ดูรูปที่ 13 เป็นตัวอย่างจะเห็นฟันเฟืองต่อเข้ากับแกนโรเตอร์โดยตรงของ Meter Sensor เพื่อสร้างสัญญาณไฟฟ้าพัลส์เมื่อโรเตอร์เริ่มหมุนและทำการวัดปริมาตร สัญญาณไฟฟ้าพัลส์จะถูกบริหารจัดการให้เป็นที่เรียบร้อยพร้อมส่งออกไปยังส่วนประมวลผล (Calculator) ซึ่งจะทำหน้าที่แปลงสัญญาณไฟฟ้าให้เป็นค่าปริมาตรของเหลวที่วัดได้ ก่อนส่งไปแสดงผลการวัดปริมาตรต่อไป

รูปที่ 13 Meter Sensor ทำงานร่วมกันกับ Transducer ร่วมกันเป็นส่วนเดียวกัน
สำหรับมาตรวัดฯ รุ่นๆ เก่า ซึ่งไม่ได้ใช้เทคนิคสัญญาณไฟฟ้าพัลส์ (Pulses) ด้วย ทรานสดิวเซอร์ แต่ใช้ระบบกลไกเชิงกลทำงานร่วมระหว่างส่วนวัดปริมาตร (Meter Sensor) กับระบบกลไกเพลาขับ และ/หรือ ระบบเฟืองเฟืองทด (Gear Train) โดยทำการเชื่อมต่อกลไก และ/หรือ ระบบเฟืองเฟืองทดเข้ากับแกนโรเตอร์ของมาตรวัดปริมาตรของเหลวเพื่อส่งแรงไปขับส่วนแสดงค่าในการประมวลการวัดและแสดงผลการวัดปริมาตรของเหลวที่วัดได้ ดังในรูปที่ 14





รูปที่ 14 ใช้ระบบเพลา หรือระบบเฟืองทด พร้อมระบบปรับสัดส่วนอัตราทดต่อจากแกนโรเตอร์ เพื่อไปขับส่วนแสดงค่าแบบกลไก
บางครั้งผู้ผลิตก็มีการปรับปรุงมาตรวัดฯ ที่ทำงานแบบกลไกแบบเดิมดังในรูปที่ 14 โดยเอาทรานสดิวเซอร์เข้ามาทำงานทดแทนระบบกลไก/ระบบระบบเฟืองทดบางส่วน หรืออาจเรียกว่า “แบบไฮบริด (Hybrid)” เป็นการผสมกลไกกับระบบไฟฟ้าว่างั๊ยเถอะ ก็คล้ายๆ กับเครื่องชั่งรถยนต์บรรทุกที่ยังใช้ระบบคาน แต่มาติดตั้ง Loadcell เข้ากับเพลาที่ส่งไปขับส่วนแสดงค่าคันชั่งน้ำหนักนั้นเอง

รูปที่ 15 ใช้ทรานสดิวเซอร์เข้ามาทำงานร่วมกับระบบกลไก/ระบบระบบเฟืองทดเดิมบางส่วนโดยปรับเอาส่วนแสดงค่าแบบกลไกดังในรูปที่ 14 ออกไปแล้วเอาส่วนแสดงค่าดิจิตอลเข้ามาสวมแทน หรืออาจเรียกว่า ระบบ Hybrid
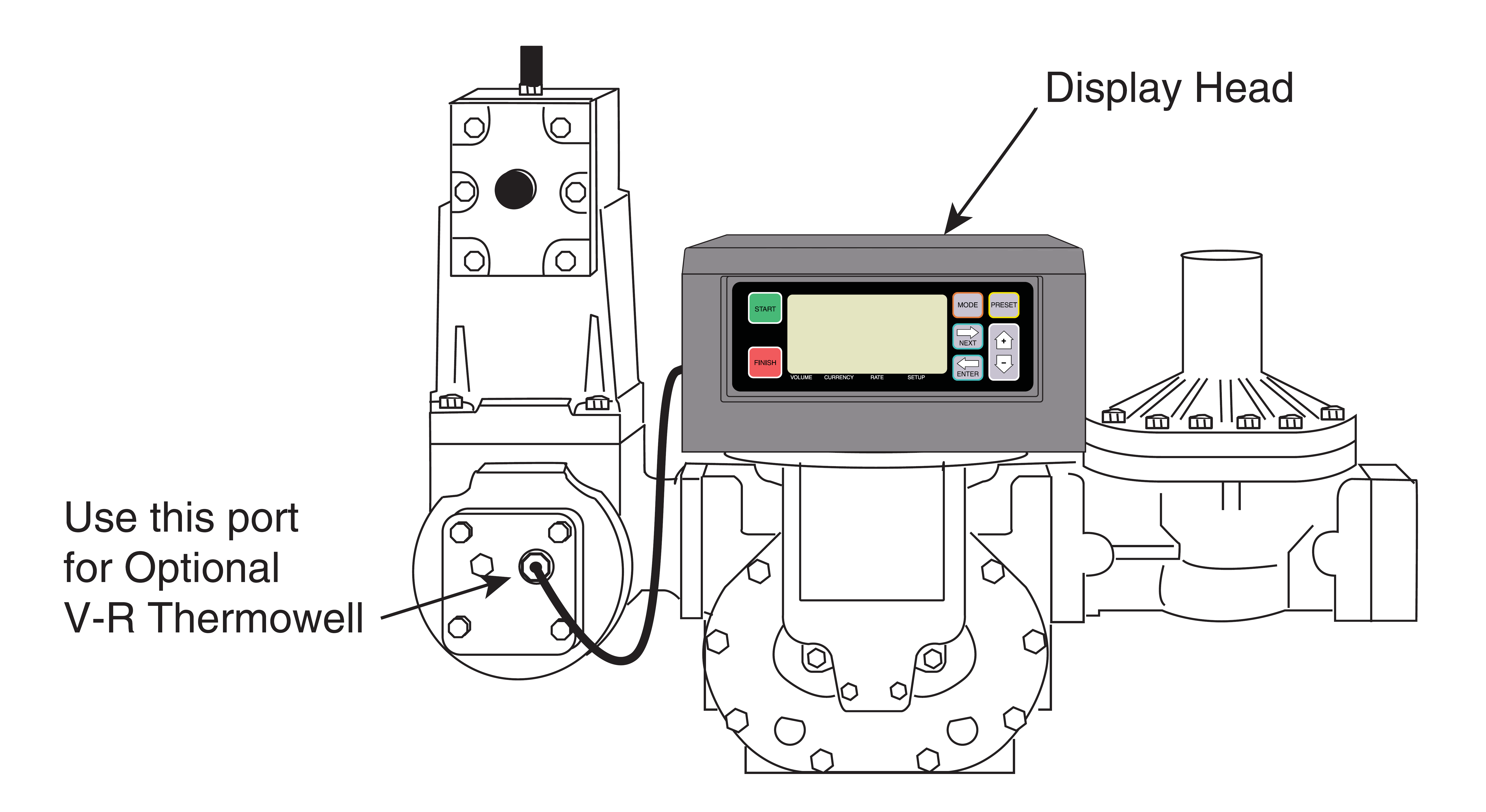
2.2. รูปแบบการทำงาน “ส่วนวัดปริมาตร (Meter Sensor), ทรานสดิวเซอร์ (Transducer) และ Calculator ทำงานแยกอิสระออกจาก” นั้นคือไม่มีการเชื่อมต่อใดๆเข้ากับภายในตัวเรือนส่วนวัดปริมาตร เพียงแต่ใช้ทรานสดิวเซอร์ต่อตรงเข้ากับแกนโรเตอร์ หรือส่วนวัดปริมาตรจากภายนอกตัวเรือนส่วนวัดปริมาตร ดังในรูปที่ 16, รูปที่ 17 และ รูปที่ 18

รูปที่ 16 Meter Sensor ทำงานแยกกับ Transducer และ Calculator

.jpg)
รูปที่ 17 Meter Sensor ทำงานแยกกับ Transducer และ Calculator สำหรับมาตรวัดก๊าซ LPG ในสถานีบริการ
.jpg)

รูปที่ 18 Meter Sensor ทำงานแยกกับ Transducer และ Calculator สำหรับมาตรวัดน้ำมันเชื้อเพลิงในสถานีบริการ
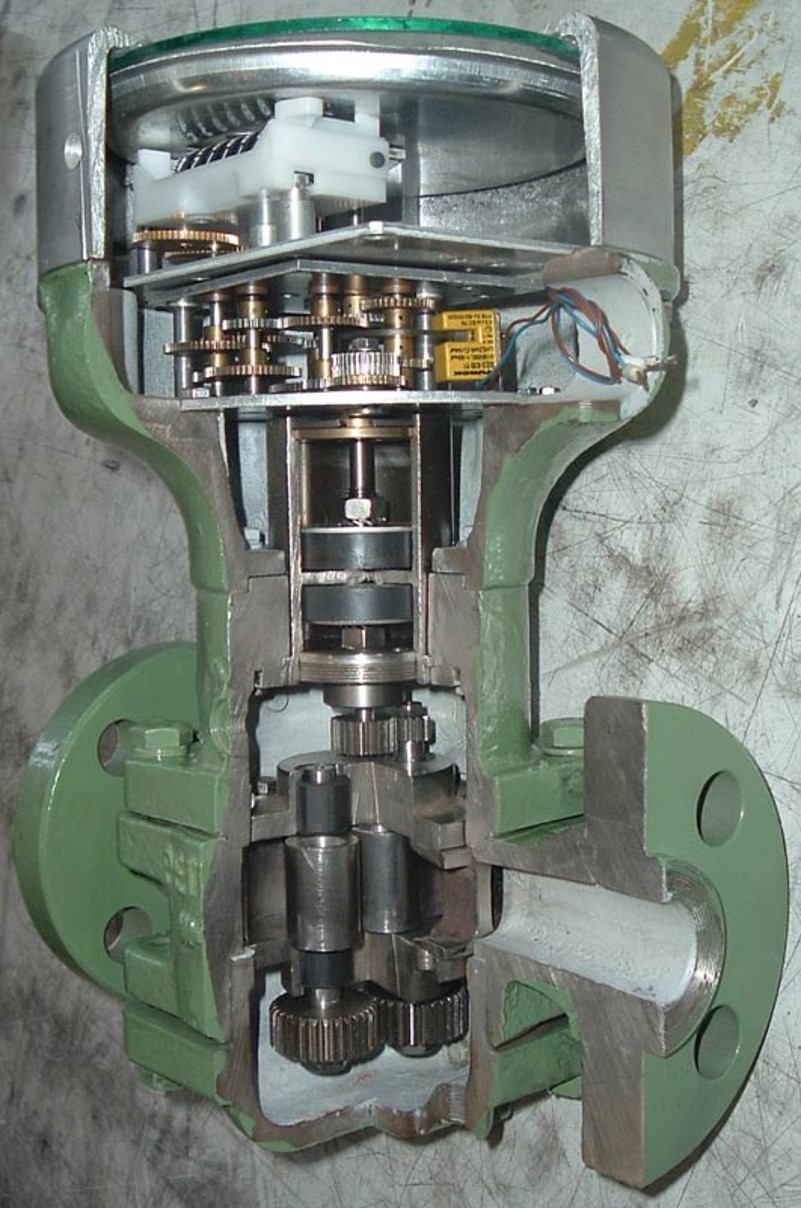
3. Calculator และส่วนแสดงค่า (Indicating Device) เรื่องนี้อาจเกิดความสับสนได้หากนำนิยาม Indicating Device ของเครื่องชั่งไม่อัตโนมัติมาใช้ในมาตรวัดปริมาตรของเหลว ดังนั้นเราจะพูดในเชิงหน้าที่ (Functions) ของอุปกรณ์ก็แล้วกันเพราะหากแยกให้อิสระต่อกันในทางกายภาพเราอาจสับสน ในกรณีของมาตรวัดปริมาตรของเหลว (OIML R117) ที่พบ Calculator และส่วนแสดงค่า (Indicating Device) บ่อยจะเป็นแบบกลไกและแบบอิเล็คทรอนิคดังในรูปที่ 19 โดยภายในส่วนแสดงค่าจะมีส่วนการทำงานประกอบด้วย 2 ส่วน คือส่วนประมวลผล (Calculator) และ ส่วนแสดงค่า (Indicating Device) หรือจอแสดงผล (Display) หากระบบการทำงานเป็นแบบอิเล็คทรอนิค เมื่อทรานสดิวเซอร์ผลิตสัญญาณไฟฟ้าพัลส์และทรานสดิวเซอร์ส่งสัญญาณไฟฟ้าออกมายังส่วนประมวลผล (Calculator) ให้ทำการประมวลผลจากสัญญาณไฟฟ้าพัลส์แปลงเป็นค่าปริมาตรของเหลวที่วัดได้ จากนั้นส่วนประมวลผลทำหน้าที่ส่งผลปริมาตรของเหลวที่วัดได้ไปแสดงที่ส่วนแสดงค่า (Indicating Device) หรือจอแสดงผล (Display) ต่อไป บางครั้งผู้ผลิตหรือผู้ขายหรือผู้ใช้อาจนำ Batch Controller (ดูรูปที่ 20) มาใช้ทำหน้าที่ของส่วนแสดงค่าพร้อมกับการควบคุมระบบการส่งจ่ายของเหลว เช่น อัตราการไหลส่งจ่ายและปริมาตรส่งจ่ายผ่านมาตรวัดปริมาตรของเหลว เป็นต้น

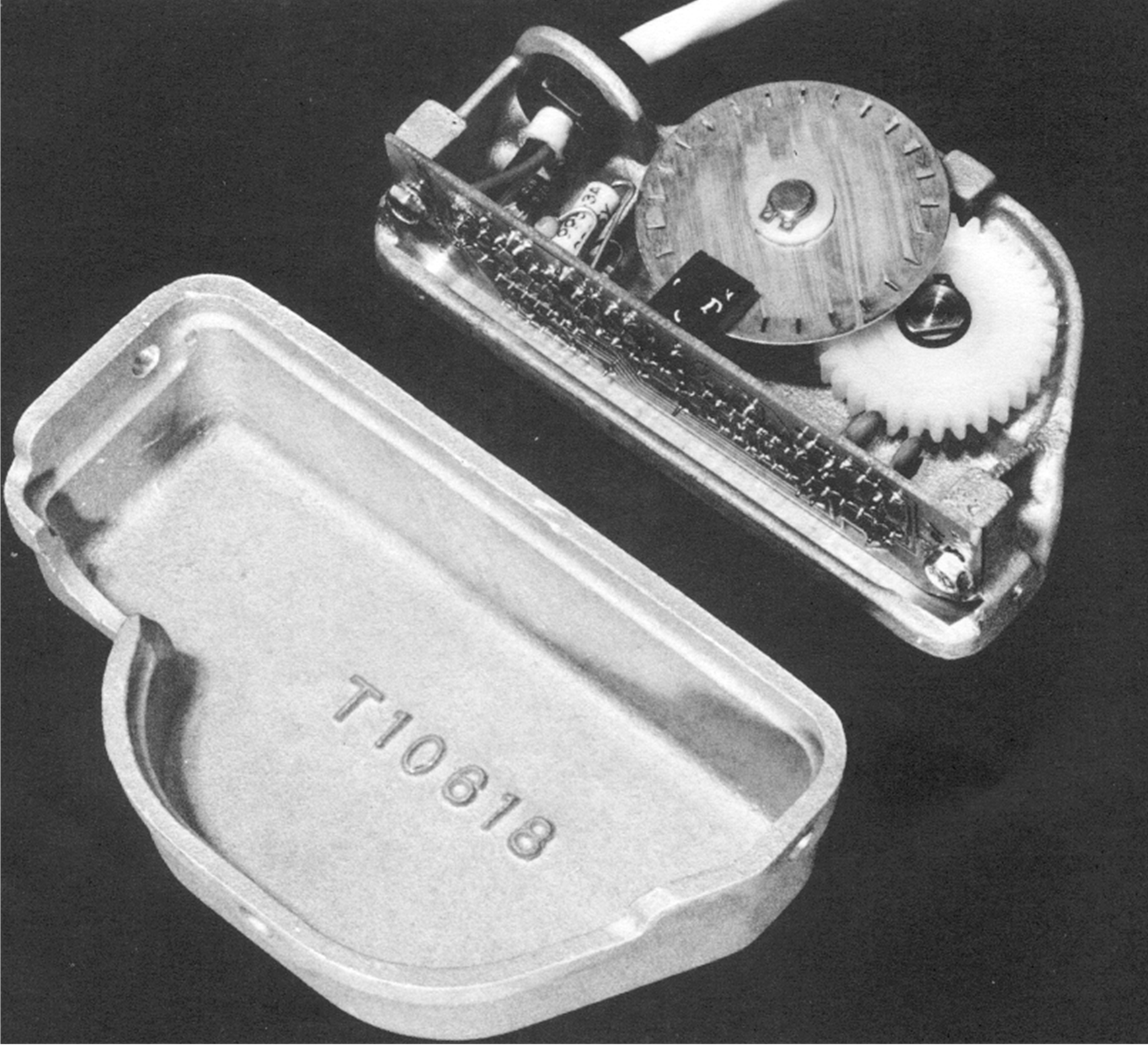
รูปที่ 19 ส่วนแสดงค่า (Indicating Device) แบบกลไก (ซ้ายมือ) และแบบอิเล็คทรอนิค (ขวามือ)




รูปที่ 20 ส่วนแสดงค่า (Indicating Device) หรือ Flow Computer หรือ Batch Controller
จากนิยามของ Meter ตาม OIML R117
Meter = Measuring Device; T.m.1 + Calculator + Indicating Device
= (Meter Sensor; T.s.3 + Transducer; T.t.1) + Calculator; T.c.1 + Indicating Device; T.i.1
การนำส่วนทำงานทั้ง Meter Sensor, Transducer, Calculator และ Indicating Device ให้สามารถทำงานเข้าขากัน สอดคล้อง และสอดรับการได้โดยไร้ตะเข็บจำเป็นต้องอยู่บนหลักพื้นฐานทางวิศวกรรมที่จับต้องและอธิบายได้ ไม่ใช่อยากจับส่วนทำงานใดจากบริษัทผู้ผลิตใดเอามายำๆๆเข้าด้วยกันแล้วคุยโม้ว่ามีขีดความสามารถอย่างนั้นอย่างนี้ เป็นเรื่องอันตราย บุคคลที่ทำงานในงานชั่งตวงวัดตามข้อบัญญัติของกฎหมายทั้งภาคเอกชน ภาครัฐ ภายเหนือ ภาคใต้ ภาคใดๆ ต้องกลับมาสนใจกันอย่างจริงๆจังๆ กันได้แล้ว อย่าเข้าใจว่าภาคเอกชนที่ขายเครื่องชั่งตวงวัดเก่งกาจมีความรู้สูง สามารถนำชิ้นส่วนทำงานแต่ละชิ้นจากแต่ละบริษัทผู้ผลิตนำมาประกอบเป็นเครื่องชั่งตวงวัดแล้วจะถูกต้องตามพระราชบัญญัติมาตราชั่งตวงวัด พ.ศ. 2542 และแก้ไขเพิ่มเติม วันนี้ผมเริ่มไม่มั่นใจ.... เริ่มหวั่นใจ...... และเริ่มไม่เชื่อใจ...... แล้วครับ.....
การตรวจสอบความเข้ากันได้ระหว่างส่วนวัดค่าปริมาตร (Meter Sensor), ทรานสดิวเซอร์ (Transducer) ส่วนประมวลผล (Calculator) และส่วนแสดงค่า (Indicating Device) ของมาตรวัดปริมาตรของเหลวชนิด Positive Displacement
กรณีศึกษานี้เรายกตัวอย่างโดยใช้ข้อมูลจริงๆ จากการสอบเทียบมาตรวัดปริมาตรของเหลว แบบมาตรา (Master Meter) ชนิด Positive Displacement เลขลำดับประจำเครื่อง 704-1111-56 เทียบกับถังตวงแบบมาตรา โดยมีหลักการทำงานของสัญญาณด้านทางออกจากทรานสดิวเซอร์อยู่ใน Signal Protocol ชนิด “ความถี่ (Frequency)” เท่านั้น ไม่พูดถึง Modus/RS-485, HART/RS-485, FOUNDATION Fieldbus, mA, mV (ดูรูปที่ 21) ฯลฯ

รูปที่ 21 สัญญาณด้านทางออกจาก Transducer + Transmitter อยู่ใน Signal Protocol ต่างๆ
มาตรวัดปริมาตรของเหลว แบบมาตรา (Master Meter) เลขลำดับประจำเครื่อง 704-1111-56
ส่วนวัดปริมาตร (Measuring Element หรือ Meter Sensor)
ชั้นความเที่ยง 0.1
ขนาดมาตรวัด (นิ้ว) 6 นิ้ว
ชนิด (Type) PD Meter
รุ่น (Model) BM850
หมายเลขลำดับการผลิต (Serial No.) XX 80XXX
ผู้ผลิต Avery-Hardoll
อัตราการไหลสูงสุด (Qmax) 3,850 l/min
อัตราการไหลต่ำสุด (Qmin) 300 l/min
Emin 1,000 l
Cyclic Volume 6.82 lpr (l/round)

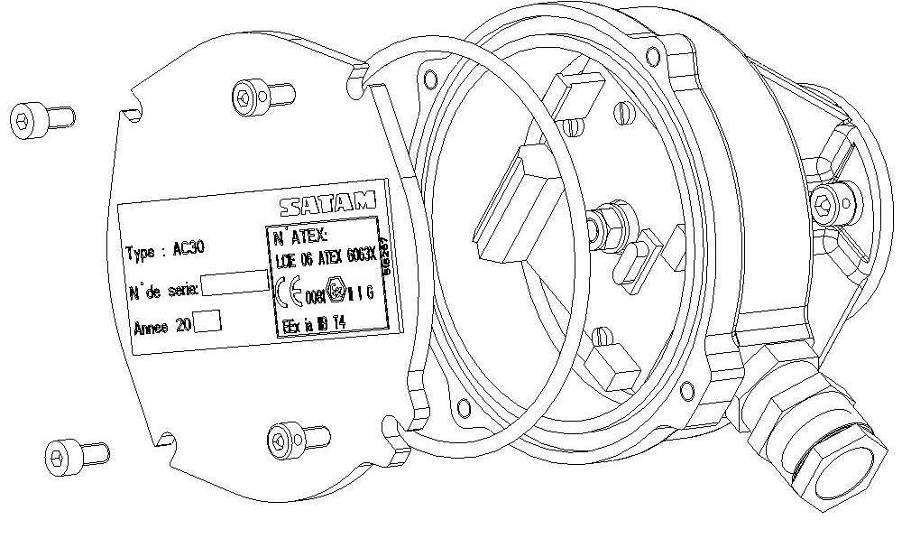
รูปที่ 22 Avery-Hardoll รุ่น BM850 ขนาด 6 นิ้ว เดิมทีส่วนแสดงค่าเป็นกลไก จากนั้นมาดัดแปลงให้ส่วนแสดงค่าเป็นอิเล็คทรอนิคโดยถอดชิ้นส่วนกลไกแล้วติดตั้ง Traducer (รูปที่ 23) และ Indicating Device (รูปที่ 25)
Transducer / Pulse Output Device
ชั้นความเที่ยง -
ผู้ผลิต Eltomatic
รุ่น (Model) DK 9490 Type 01-09
หมายเลขลำดับการผลิต (Serial No.) 7527XXX
Number pulses 100 ppr (pulses per round)
Output frequency RPM/60 x ppr £ 1,000 Hz
RPM Max. 1,000 rpm

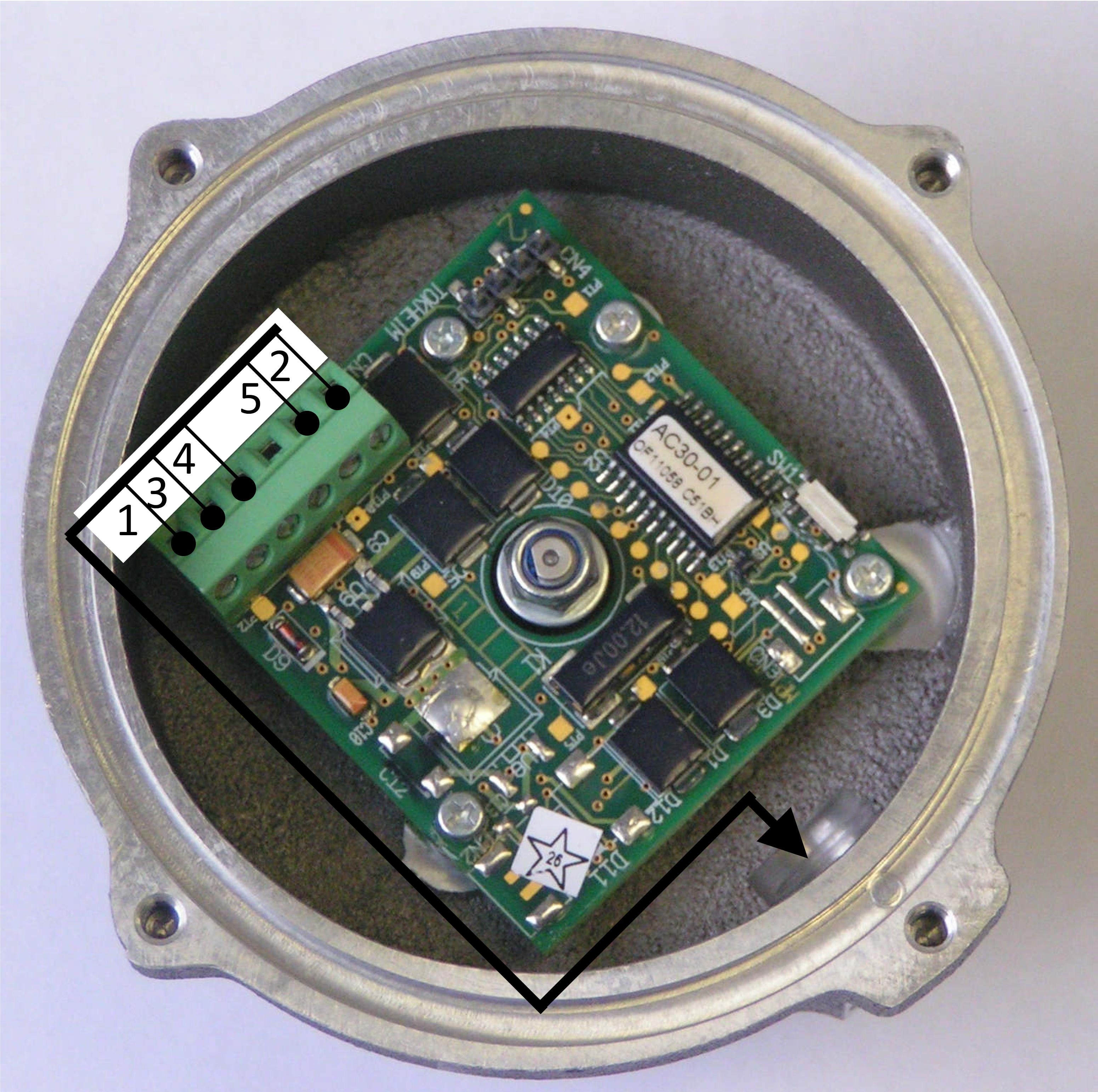
รูปที่ 23 Transducer / Pulse Output, Eltomatic, DK 9490 Type 01-09
รูปที่ 24 ข้อมูลทางเทคนิคของ Transducer / Pulse Output, Eltomatic, DK 9490 Type 01-09
Calculator & ส่วนแสดงค่า (Indicating Device)
ชั้นความเที่ยง -
ผู้ผลิต VEEDER-ROOT EMR3
รุ่น (Model) 845693-321
หมายเลขลำดับการผลิต (Serial No.) 222XX
Max. Pulse Rate 750 pulses/sec
Pulser Capacity: 0 - 1000 Hz
ขั้นหมายมาตราต่ำสุด (d) (ml) 10 ml
K-factor 14.663 pulses/liter

รูปที่ 25 Calculator & ส่วนแสดงค่า (Indicating Device), VEEDER-ROOT EMR 3
ถังตวงแบบมาตรา (Prover Tank)
เลขลำดับประจำเครื่อง 702-2222-56
พิกัดกำลัง 5,000 ลิตร
ขั้นหมายมาตราต่ำสุด (dProver Tank) 0.2 ลิตร
อัตราเผื่อเหลือเผื่อขาด (OIML R120) 1/2,000 x Capacity
เนื่องจากเป็นการสอบเทียบมาตรวัดปริมาตรของเหลวชนิด Positive Displacement ขนาด 6 นิ้ว เลขลำดับประจำเครื่อง 704-1111-56 ซึ่งมีอัตราการไหลสูงสุด 3,850 l/min และอัตราการไหลต่ำสุด 300 l/min โดยมีรายละเอียดของชิ้นส่วนประกอบทำงานร่วมกันของ Meter Sensor, Transducer; Calculator, Indicating Device รายละเอียดดังข้อมูลข้างบนนั้น ในรูปแบบดังในรูปที่ 16 โดยสอบเทียบมาตรวัดฯ เทียบกับถังตวงแบบมาตราพิกัดกำลัง 5,000 ลิตร, ขีดขั้นหมายมาตรา 0.2 l โดยจัดเรียงไว้ในระบบท่อทางด้านท้ายน้ำเมื่อเทียบกับมาตรวัด เพื่อให้แน่ใจว่าการทำงานร่วมกันของชิ้นส่วนอุปกรณ์ทั้งหมดได้ส่งมอบความเที่ยงของมาตรวัดตามที่ต้องการและสามารถเลือกใช้แบบมาตราที่มีความเที่ยงและพิกัดกำลังที่เหมาะสมถูกต้อง (ดูรูปที่ 26) เราจึงต้องมาพิจารณาความสอดคล้องของเรื่องราวทั้งหมดไปพร้อมๆ กันดังต่อไปนี้
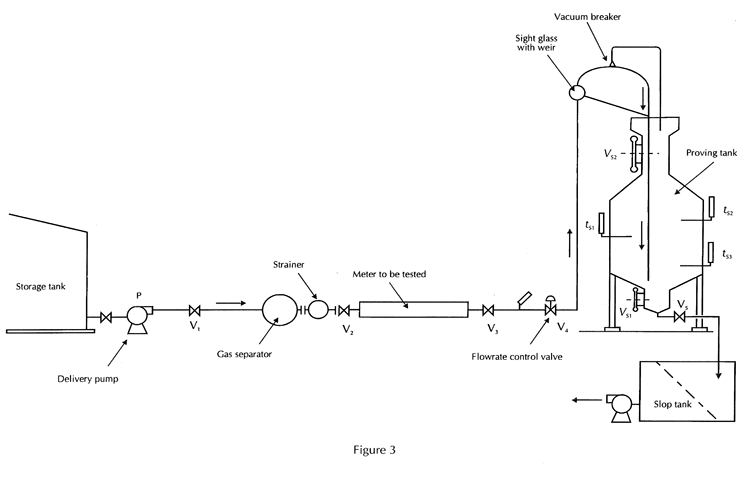
รูปที่ 26 ระบบตรวจสอบมาตรวัดปริมาตรของเหลว ตาม OIML R 120, Edition 2010 (E)
1. ตรวจสอบ Transducer / Pulse Output Device สามารถรองรับการหมุนของโรเตอร์ของ Meter Sensor ที่อัตราการไหลสูงสุดได้หรือไม่
Meter Sensor เป็น Avery-Hardoll รุ่น (Model) BM850 ขนาด 6 นิ้ว มี อัตราการไหลสูงสุดของมาตรวัดฯ 3,850 l/min และมีปริมาตรต่อรอบการหมุนโรเตอร์ 1 รอบ (Cyclic Volume) เท่ากับ 6.82 lpr (l/round) ดังนั้นโรเตอร์ของ Meter Sensor จะหมุนที่อัตราการไหลสูงสุดด้วย 3,850 l/min / 6.82 lpr = 564.52 rpm
จากข้อมูลของ Transducer / Pulse Output Device ยี่ห้อ Eltomatic รุ่น DK 9490 Type 01-09 รองรับการหมุนได้สูงสุด 1,000 rpm ดังนั้นทรานสดิวเซอร์รองรับการหมุนของโรเตอร์ของ Meter Sensor ที่อัตราการไหลสูงสุดซึ่งหมุนด้วยความเร็วรอบ 564.52 rpm ได้เนื่องจากทรานสดิวเซอร์ต่อตรงเข้ากับแกนหมุนโรเตอร์โดยไม่ผ่านระบบเฟื่อทดนั้นคืออัตราส่วนทดรอบเท่ากับ 1 : 1 ตัวอย่างดังในรูปที่ 16 แต่หากมีระบบเฟืองทดจากแกนโรเตอร์ก่อนที่ไปขับตัว Transducer / Pulse Output Device ตัวอย่างดังในรูปที่ 15 เป็นระบบ Hybrid ก็ต้องนำอัตราส่วนทดของระบบเฟืองทดมาคำนวณการทดรอบการหมุนระหว่างแกนโรเตอร์กับแกนตัวหมุนกำเนิดสัญญาณไฟฟ้าพัลส์ด้วย นอกจากนี้ถือเป็นการพิจารณาทางอ้อมไปในตัวว่าการออกแบบทรานสดิวเซอร์สามารถรองรับการหมุนได้สูงรอบจัดเพียงใด เช่น ระบบลูกปืน ให้สามารถรองรับแรงกระทำต่อแกนหมุนของทรานสดิวเซอร์ได้หรือไม่ มีระบบหล่อลื่นอย่างไร ฯลฯ
นอกจากนี้ต้องตรวจสอบว่าวงจรอิเล็คทรอนิคของทรานสดิวเซอร์มีขีดความสามารถสร้างสัญญาณไฟฟ้าพัลส์ได้ในปริมาณที่ได้บ่งบอกไว้ในข้อกำหนดทางเทคนิคหรือไม่ พบว่ามี 5 หลักการทำงานหลักในการสร้างสัญญาณไฟฟ้าพัลส์โดย Transducer / Pulse Output Device โดยให้จำนวนสัญญาณไฟฟ้าพัลส์ที่ถูกสร้างขึ้นมาเป็นสัดส่วนโดยตรงกับการไหลของเหลวผ่านมาตรวัดฯ 5 หลักการทำงานมีชื่อเรียกว่า
· Hall Effect
· Transistors
· Reed Switches
· Namur Sensor, และ
· An Optical Detector
โดยมีชิ้นส่วนการทำงานของตัวกำเนิดสัญญาณไฟฟ้าพัลส์ในแต่ละหลักการทำงานชิ้นส่วนหนึ่งทำหน้าที่ต่อเชื่อมกลไกเข้ากับแกนโรเตอร์ของมาตรวัดปริมาตรของเหลว ชนิด PD ยกตัวอย่างในกรณีที่ตัวสร้างสัญญาณไฟฟ้าพัลส์ของทรานสดิวเซอร์ (Transducer) ที่มีหลักการทำงาน An Optical Detector (ดูรูปที่ 27) จะมีตัวกำเนิดแสง (Emitter) และตัวรับแสง (Detector) โดยมีแผ่นเจาะรู (Perforated Disks) วางไว้อยู่ตรงกลางระหว่างตัวกำเนิดแสงกับตัวรับแสงเพื่อยอมให้แสงจากตัวกำเนิดแสงส่องถึงตัวรับแสงเมื่ออยู่ตรงตำแหน่งร่อง (Slots) ที่เจาะไว้เท่านั้น ดังนั้นเมื่อแสงถูกส่งจากตัวกำเนิดแสงถึงตัวรับแสงวงจรไฟฟ้าจะอยู่ในลักษณะ On-OFF ส่งผลก่อให้เกิดเป็นสัญญาณไฟฟ้าพัลส์ หากรอบการหมุนของตัวสร้างสัญญาณไฟฟ้าพัลส์ของทรานสดิวเซอร์สูงมากจนเกินระดับหนึ่งจนวงจรอิเล็ดทรอนิคไม่สามารถแยกแยะสัญญาณไฟฟ้าพัลส์ได้ส่งผลให้เกิดความไม่ถูกตรงเที่ยงตรงหรือเกินขีดความสามารถของทรานสดิวเซอร์ทำงานได้ จะส่งผลให้การวัดค่าปริมาตรของเหลวไม่เสถียรถูกต้องเที่ยงตรงตลอดระยะเวลาการทำงานของมาตรวัดฯ ในงานชั่งตวงวัดตามข้อบัญญัติของกฎหมาย มีเรื่องหนึ่งที่มีปัญหาคล้ายกันหมดนั้นคือ ผู้ใช้หรือผู้ครอบครองเครื่องชั่งตวงวัดชอบให้เครื่องชั่งตวงวัดอ่านได้ละเอียดมากที่สุดโดยคิดว่ายิ่งอ่านได้ระเอียดมากที่สุดยิ่งเป็นเครื่องชั่งตวงวัดที่ดี แต่ในความเป็นจริงแล้วเครื่องชั่งตวงวัดอ่านได้ละเอียดได้ระดับหนึ่งตามเทคโนโลยีและราคาค่าตัวของมัน หากจะให้อ่านละเอียดเกินตัวต้องแลกมาด้วยความเสถียรในการวัดและความเที่ยงในการวัดที่กระทำซ้ำๆ ต่ำลง ก็พึ่งระมัดระวังด้วย และในกรณีศึกษานี้ก็มีแนวโน้มไปในทิศทางที่ว่าด้วยเช่นกัน คือต้องการให้มาตรวัดปริมาตรของเหลว ขนาดใหญ่สำหรับใช้ในการซื้อขายแบบส่ง (Whole Sale) ให้อ่านได้ละเอียดเทียบเท่ามาตรวัดปริมาตรของเหลวขนาดเล็กสำหรับใช้ในการซื้อขายปลีก (Retail Sale) ดังนั้นการตรวจสอบรอบการหมุนของทรานสดิวเซอร์จึงจำเป็น และดำเนินการตรวจสอบต่อไปในขั้นตอน 2

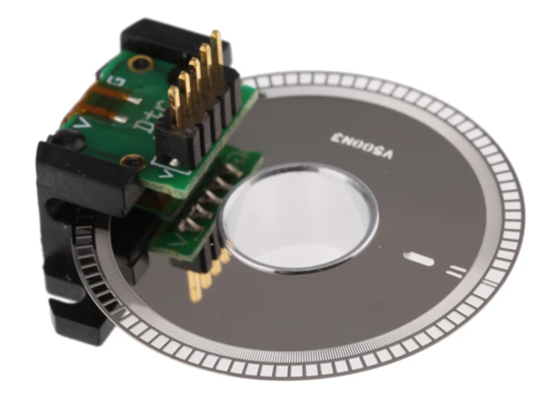
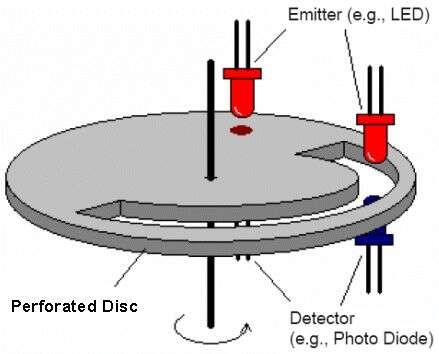
รูปที่ 27 Pulse Encoder Device ผลิตสัญญาณไฟฟ้าพัลส์ด้วยหลักการทำงาน An Optical Detector
PASS
2. ตรวจสอบ Transducer / Pulse Output Device ผลิตสัญญาณไฟฟ้าพัลส์ได้จำนวนเท่าใดเมื่อโรเตอร์ของ Meter Sensor หมุนที่อัตราการไหลสูงสุด
จากข้อมูลของ Transducer / Pulse Output Device ยี่ห้อ Eltomatic รุ่น DK 9490 Type 01-09
Number pulses 100 ppr (pulses per round)
Output frequency RPM/60 x ppr £ 1,000 Hz
564.52 rpm/60 x 100 ppr = 940.87 pulses/sec (Hz)
หมายถึงทรานสดิวเซอร์จะผลิตสัญญาณไฟฟ้าพัลส์ได้ที่อัตราการไหลสูงสุดของมาตรวัด (โรเตอร์หมุนด้วยจำนวน rpm สูงสุดเท่ากับ 564.52 rpm) ด้วยจำนวนพลัซ์ 940.87 pulses/sec หรือ 940.87 Hz ซึ่งเป็นค่าไม่เกินค่าขีดความสามารถของ Transducer / Pulse Output Device ที่มีขีดความสามารถผลิตสัญญาณไฟฟ้าพัลส์สุงสุดระบุไว้ คือ 1,000 Hz
PASS
3. ตรวจสอบส่วนประมวลผล (Calculator) & ส่วนแสดงค่า (Indicating Device) จึงต้องตรวจสอบว่าส่วนประมวลผล & ส่วนแสดงค่าสามารถรองรับปริมาณสัญญาณไฟฟ้าพัลส์หรือความถี่ของสัญญาณไฟฟ้าพัลส์ที่ได้ถูกผลิตและส่งสัญญาณไฟฟ้าพัลส์มาจาก Transducer / Pulse Output Device ได้หรือไม่ ก่อนที่ส่วนประมวลผลและส่วนแสดงค่าจะนำข้อมูลสัญญาณไฟฟ้าพัลส์ที่ได้รับมาประมวลผลแล้วแปลงเป็นค่าปริมาตรของเหลวที่วัดได้ต่อไป
จากข้อมูลของส่วนประมวลผล & ส่วนแสดงค่าพบว่ามีขีดความสามารถรองรับความถี่หรือข้อมูลด้วย
Pulser Capacity: 0 – 1,000 Hz
ดังนั้นส่วนประมวลผล & ส่วนแสดงค่าสามารถรองรับความถี่ของสัญญาณไฟฟ้าพัลส์ที่ส่งมาจากทรานสดิวเซอร์ด้วยความถี่สูงสุด 940.87 pulses/sec หรือ 940.87 Hz (< 1,000 Hz) ที่อัตราการไหลสูงสุดของมาตรวัดฯ หรือพูดอีกนัยหนึ่งว่าตรวจสอบเครื่องรับกับเครื่องส่งว่าทำงานสอดรคล้องและสอดรับในการรับส่งความถี่ของสัญญาณไฟฟ้าพัลส์นั้นเอง
PASS
4. เมื่อส่วนประมวลผล & ส่วนแสดงค่าสามารถรองรับความถี่สัญญาณไฟฟ้าพัลส์ได้ จากนั้นตรวจสอบว่าความสัมพันธ์ของระยะเวลาประมวลผลสัญญาณของส่วนประมวลผล & ส่วนแสดงค่าเทียบกับระยะเวลาในการส่งจ่ายของเหลวโดยมาตรวัดปริมาตรของเหลวตั้งแต่เริ่มต้นจนเสร็จสิ้นด้วยอัตราการไหลของเหลวสูงสุดของมาตรวัดฯ หรือพูดอีกนัยหนึ่งคือตรวจสอบการ Configuration ของค่า K-Factor ให้สอดคล้องกับอัตราการไหลของเหลวที่ผ่านตัวมาตรวัดปริมาตรของเหลวเพื่อวัดปริมาตรของเหลวหรือไม่
เนื่องจากเป็นการสอบเทียบมาตรวัดปริมาตรของเหลว ชนิด PD เทียบกับถังตวงแบบมาตรา ด้วยเหตุนี้เราจึงเลือกพิจารณาใช้ค่าปริมาตรของเหลววัดได้ที่พิกัดกำลังถังตวงแบบมาตรา ณ อัตราการไหลสูงสุดของมาตรวัดฯ 3,850 l/min ในการคำนวณ โดยอยู่ภายใต้ค่า K-Factor ที่กำหนดตามคำแนะนำผู้ผลิต Veeder Root EMR3 จากข้อมูลดูรูปที่ 28 โดยส่วนแสดงค่ามีขีดความสามารถในการรับและถ่ายทอดข้อมูลประมวลผลสัญญาณอยู่ไม่เกิน 750 pulses/sec.
อัตราการไหลสูงสุดของมาตรวัดฯ 3,850 l/min = 1,017.06 gpm (gallons per minute) ดังนั้นเมื่อทำการประเมิน / Interpolate ของความสัมพันธ์ K-Factor และอัตราการไหล (รูปที่ 28)
10 pulses/gallon 4,500 gpm
100 pulses/gallon 450 gpm
ตามความเข้าใจของผมจะได้ว่าด้วยอัตราการไหลสูงสุด 3,850 l/min = 1,017.06 gpm เราสามารถกำหนดค่า K-Factor ได้ไม่เกิน 44.245 pulses/gallon หรือ 11.688 pulses/liter ถามว่าด้วยเหตุผลุใดนั้น ขอตอบก็เพราะว่าจากรูปที่ 28 เราจะเห็นความสัมพันธ์ระหว่างการกำหนดค่า K-Factor และอัตราการไหลว่าอยู่ในรูปแบบผกผันซึ่งกันและกันนั้นคือยิ่งอัตราการไหลสูง รอบการหมุนของโรเตอร์จะยิ่งสูง ด้วยข้อจำกัดของเทคนิคการสร้างพัลส์ต่อรอบหรือความถี่ที่ผลิตสัญญาณพัลส์มีกรอบอยู่ค่าหนึ่ง และ/หรือ อัตราการถ่ายถอดข้อมูลประมวลผลมีจำกัดจึงต้องกำหนดให้ K-Factor มีค่าลดลง สุดท้ายก็คือ 10 pulses/gallon x 4,500 gpm = 45,000 pulses/minute = 750 pulses/sec. = 750 Hz หรือ 100 pulses/gallon x 450 gpm = 45,000 pulses/minute = 750 pulses/sec. = 750 Hz นั้นคือขีดความสามารถในการรับส่งและถ่ายทอดข้อมูลประมวลผลสัญญาณอยู่ไม่เกิน 750 Hz นั้นเอง ดังนั้นจึงควรกำหนดค่า K-Factor ได้ไม่เกิน 44.245 pulses/gallon (45,000 pulses/minute / 1,017.06 gpm) หรือ 11.688 pulses/liter ด้วยอัตราการไหลสูงสุด 3,850 l/min = 1,017.06 gpm
รูปที่ 28 ข้อแนะนำการ Configuration ของค่า K-Factor ให้สอดคล้องกับอัตราการไหล
แต่ในกรณีนี้ผู้ครอบครองมาตรวัดปริมาตรของเหลวชนิด Positive Displacement ขนาด 6 นิ้ว เลขลำดับประจำเครื่อง 704-1111-56 ซึ่งมีอัตราการไหลสูงสุด 3,850 l/min กำหนดให้ค่า K-Factor 14.663 pulses/liter ในส่วนแสดงค่า (Indicating Device) VEEDER-ROOT EMR3 ซึ่งมีค่ามากกว่าค่า K-Factor แนะนำ 11.688 pulses/liter ภายใต้เงื่อนไขขีดความสามารถถ่ายทอดข้อมูลในการประมวลผลการวัดปริมาตรของเหลวที่ 750 pulses/sec. = 750 Hz ดังนั้นที่อัตราการไหลสูงสุดของมาตรวัดฯ จะเกิดการผลิตและรับส่งข้อมูลเท่ากับ 14.663 pulses/liter x 3,850 l/min = 940.875 pulses/sec. > 750 pulses/sec. ถือว่ากำหนดค่า K-Factor เกินขีดความสามารถถ่ายทอดข้อมูลในการประมวลผลการวัดปริมาตรของเหลว ต้องแก้ไขการการกำหนดค่า K-Factor ในส่วนแสดงค่า
FAIL
5. จากนั้นทำการตรวจสอบที่ปริมาตรทดสอบ (ถังตวงแบบมาตรา) 5,000 ลิตร ที่อัตราการไหลสูงสุดของมาตรวัดฯ จะผลิตจำนวนสัญญาณไฟฟ้าพัลส์จำนวนเท่าใดภายในเวลาดังกล่าวในรูปแบบการส่งจ่ายด้วยอัตราการไหล ดังในรูปที่ 29 และส่วนประมวลผล & ส่วนแสดงค่า, VEEDER-ROOT EMR3 ใช้ระยะเวลาในการถ่ายทอดข้อมูลจำนวนสัญญาณไฟฟ้าพัลส์ที่เกิดขึ้นเพื่อนำไปประมวลผลสัญญาณของส่วนแสดงค่านานเท่าใดเมื่อเทียบกับระยะเวลาในการส่งจ่ายของเหลวโดยมาตรวัดปริมาตรของเหลวตั้งแต่เริ่มต้นจนเสร็จสิ้นด้วยอัตราการไหลของเหลวสูงสุดของมาตรวัดฯดังในรูปที่ 29 ซึ่งหากการทำงานของส่วนแสดงค่าทำงานไม่สอดรับกับทรานสดิวเซอร์ก็จะมีปัญหาเกิดการหน่วงในการส่งสัญญาณ เพื่อนำไปประมวลผล ผลที่ตามมาก็คือจ่ายปริมาตรของเหลวแล้วเสร็จแต่มาตรวัดฯ ยังไม่แสดงผลการวัดหรือแสดงค่าปริมาตรที่วัดได้ล่าช้า จนสังเกตได้ส่วนจะมากน้อยเพียงใดแล้วแต่กรณี โดยพิจารณา
รูปที่ 29 รูปแบบรูปแบบอัตราการไหลทดสอบเมื่อเทียบกับปริมาตรของถังตวงแบบมาตรา
Transducer ผลิตจำนวนสัญญาณไฟฟ้าพัลส์
5,000 l*14.663 pulses/l = 73,315 pulses
ระยะเวลาในการส่งจ่ายเข้าถังตวงแบบมาราเสร็จสิ้น (ทางทฤษฎี)
5,000 l / 3,850 l/min = 77.92 sec.
แต่เนื่องจากส่วนประมวลผล & ส่วนแสดงค่า, VEEDER-ROOT EMR3 มีอัตราการรับส่งสัญญาณไฟฟ้าพัลส์ด้วยอัตราสูงสุด (Max. Pulse Rate) 750 pulses/sec ไม่ใช่ 14.663 pulses/liter x 3,850 l/min = 940.875 pulses/sec. > 750 pulses/sec. ดังนั้นเมื่อรับสัญญาณไฟฟ้าพัลส์ 73,315 pulses ที่อัตราการไหลสูงสุดแล้วต้องใช้ระยะเวลาในการถ่ายทอดข้อมูลจำนวนสัญญาณไฟฟ้าพัลส์ที่เกิดขึ้นเพื่อนำไปประมวลผลสัญญาณ
73,315 pulses /750 pulses/sec = 97.75 sec.
นั้นหมายถึงส่วนประมวลผล & ส่วนแสดงค่า, VEEDER-ROOT EMR3 ใช้ระยะเวลาในการถ่ายทอดข้อมูลเพื่อไปประมวลผลการวัดปริมาตรมากกว่าระยะเวลาในการส่งจ่ายปริมาตราของเหลว 5,000 ลิตรด้วยอัตราการไหลสูงสุดของมาตรวัดฯ 3,850 l/min เกิดการหน่วงสัญญาณ 97.75 – 77.92 = 19.83 sec ถือว่ามากไป !!! ต้องทำการปรับค่า K-Factor ใหม่ให้เหมาะสมกับขีดความสามารถของส่วนประมวลผล & ส่วนแสดงค่า, VEEDER-ROOT EMR3 กับ Transducer
FAIL
หากทำการปรับค่า K-Factor ในส่วนประมวลผล & ส่วนแสดงค่า, VEEDER-ROOT EMR3 ให้มีค่า K-Factor 11.688 pulses/liter ภายใต้เงื่อนไขขีดความสามารถถ่ายทอดข้อมูลในการประมวลผลการวัดปริมาตรของเหลวที่ 750 pulses/sec. = 750 Hz
Transducer ผลิตจำนวนสัญญาณไฟฟ้าพัลส์
5,000 l*11.688 pulses/l = 58,440 pulses
ระยะเวลาในการส่งจ่ายเข้าถังตวงแบบมาราเสร็จสิ้น (ทางทฤษฎี)
5,000 l / 3,850 l/min = 77.92 sec.
แต่เนื่องจากส่วนประมวลผล & ส่วนแสดงค่า, VEEDER-ROOT EMR3 มีอัตราการรับส่งสัญญาณไฟฟ้าพัลส์ด้วยอัตราสูงสุด (Max. Pulse Rate) 750 pulses/sec ดังนั้นเมื่อรับสัญญาณไฟฟ้าพัลส์ 58,440 pulses ที่อัตราการไหลสูงสุดแล้วต้องใช้ระยะเวลาในการถ่ายทอดข้อมูลจำนวนสัญญาณไฟฟ้าพัลส์ที่เกิดขึ้นเพื่อนำไปประมวลผลสัญญาณ
58,440 pulses /750 pulses/sec = 77.92 sec.
นั้นหมายถึงส่วนประมวลผล & ส่วนแสดงค่า, VEEDER-ROOT EMR3 ใช้ระยะเวลาในการถ่ายทอดข้อมูลเพื่อไปประมวลผลการวัดปริมาตรเท่ากับระยะเวลาในการส่งจ่ายปริมาตราของเหลว 5,000 ลิตรด้วยอัตราการไหลสูงสุดของมาตรวัดฯ 3,850 l/min เกิดการหน่วงสัญญาณ 77.92 – 77.92 = 0 sec พอวัดปริมาตรของเหลวเสร็จปั๊บส่วนประมวลผลและส่วนแสดงค่าสามารถแสดงผลการวัดทันที่ที่ครบปริมาตรทดสอบ 5,000 ลิตร
6. ตรวจสอบการกำหนดค่าขั้นหมายมาตรา (d) ของส่วนแสดงค่าของมาตรวัดปริมาตรของเหลวชนิด Positive Displacement (dMM) ขนาด 6 นิ้ว เลขลำดับประจำเครื่อง 704-1111-56 เหมาะสมกับปริมาตรของเหลวทดสอบ ? และเพียงพอต่อการแยกแยะอัตราเผื่อเหลือเผื่อขาด (Maximum Permissible Error) หรือ Meter Factor หรือ Meter Error ได้หรือไม่ ?
จากเอกสารอ้างอิง API Manual of Petroleum Measurement Standards, Chapter 4.5 Master Meter Provers, 3rd Edition, November 2011, 7.1 General กำหนดให้ส่วนแสดงค่าทั้งแบบกลไกและแบบอิเล็คทรอนิคต้องมี Discrimination level เพียงพอและสามารถแยกแยะ Meter Factor ได้ Discrimination 1:10,000 นั้นหมายถึง การกำหนดปริมาตรของเหลวสอบเทียบมาตรวัดฯ (Minimum Tested Volume Requirement; (Vcal)min) ขึ้นอยู่กับค่าขั้นหมายมาตราของส่วนแสดงค่าของมาตรวัดปริมาตรของเหลวชนิด Positive Displacement (dMM) โดยมีความสัมพันธ์ดังตารางข้างล่าง
|
dMM
|
|
(Vcal)min
|
|
100 l
|
|
1,000,000 l
|
|
10 l
|
100,000 l
|
|
1 l
|
10,000 l
|
|
0.5 l
|
5,000 l
|
|
0.2 l
|
2,000 l
|
|
0.1 l
|
1,000 l
|
|
0.05 l
|
500 l
|
|
0.01 l
|
100 l
|
แต่เนื่องจากมาตรวัดปริมาตรของเหลวชนิด Positive Displacement ขนาด 6 นิ้ว เลขลำดับประจำเครื่อง 704-1111-56 จัดเป็นมาตรวัดแบบมาตรา (Master Meter) และมีอัตราเผื่อเหลือเผื่อขาด (MPE) 0.1% ดังนั้นจึงควรมี
· ค่า dMM ละเอียดเพียงพอในการแยกแยะ MPE 0.1% ของปริมาตรทดสอบ และ
· ค่า dMM ควรละเอียดเพียงพอแยกแยะ 1 ใน 10,000 ส่วนปริมาตรทดสอบ
ดังนั้น
· ค่า dMM ควรมีค่า 100% ของปริมาตรทดสอบ /10,000 = 0.01% ของปริมาตรทดสอบ หรือ
· ค่า dMM = MPEMM/10 = 0.1%/10 = 0.01% ของปริมาตรทดสอบ
ดังนั้นหากใช้ปริมาตรทดสอบด้วยถังตวงแบบมาตราพิกัดกำลัง 5,000 ลิตร ในการสอบเทียบ (Calibration) มาตรวัดแบบมาตราฯ ควรมีขั้นหมายมาตรา dMM = MPEMM/10 = 0.1%*5,000 l/10 = 0.5 l
แต่จากข้อมูลของมาตรวัดปริมาตรของเหลวชนิด Positive Displacement ขนาด 6 นิ้ว เลขลำดับประจำเครื่อง 704-1111-56 ได้กำหนดให้มีค่า dMM = 0.01 l ดังนั้นต้องมีปริมาตรทดสอบไม่น้อยกว่า 100 l แต่เมื่อใช้ถังตวงแบบมาตราพิกัดกำลัง 5,000 ลิตร ถือว่ามีปริมาตรทดสอบเพียงพอต่อ Discrimination level 1:10,000 ซึ่งจะให้จำนวนสัญญาณไฟฟ้าพัลส์ 14.663 pulses/liter * 5,000 liters =73,315 pulses แต่มีขั้นหมายมาตรา dMM มีค่าละเอียดมากๆๆเหลือเฟือจนเกินความเหมาะสม เพราะต้องคำนึงขึ้นไปอีกขั้นหนึ่งนั้นคือต้องหาถังตวงแบบมาตราที่มีขีดขั้นหมายมาตราน้อยกว่า ค่า dMM = 0.01 l นั้นคือประมาณ 0.01 l/5 = 0.002 l หรือ 2 cc. หรือ 2 มิลลิลิตร สำหรับถังตวงแบบมาตรา 5,000 ลิตร คิดดูนะว่ามันจะมีหรือถังตวงแบบมาตราอย่างนี้ในราชอาณาจักรได้หรือเปล่า ?? ไปดูข้อถัดไปว่าทำไม
FAIL
7. ประเด็นต่อมาที่ต้องมีคำถามในใจว่าเมื่อสัญญาณไฟฟ้าพัลส์ที่ผลิตจากทรานสดิวเซอร์แล้วทรานสดิวเซอร์ส่งสัญญาณต่อไปยังส่วนประมวลผล & ส่วนแสดงค่าเพื่อประมวลผลการวัดปริมาตร หากสัญญาณไฟฟ้าพัลส์ดังกล่าวเกิดสูญหายไปในระหว่างทางระหว่างการรับส่งสัญญาณจากทรานสดิวเซอร์ไปยังส่วนประมวลผล & ส่วนแสดงค่าจำนวน 1 พัลส์ จากสัญญาณไฟฟ้าพัลส์ 10,000 พัลส์ มาตรวัดฯ ดังกล่าวจะมีมาตรการป้องกันและตรวจสอบการสูญหายของสัญญาณไฟฟ้าพัลส์ดังกล่าวได้หรือไม่ อย่างไร
API MPMS Chapter 5.5 Fidelity and Security of Flow Measurement Pulsed-Data Transmission Systems, 2005 ได้ให้ข้อมูลการรักษาความเสถียรและความปลอดภัยในการรับส่งและถ่ายทอดข้อมูลไปหาอ่านครับ ส่วนเราจะเลือกมาตรวัดแบบมาตราเราให้อยู่ในระดับ Level A Pulse Security System หรือ Level B Pulse Security System ก็ได้เพื่อเป็นทางเลือกสำหรับมาตรการป้องกันและตรวจสอบการสูญหายของสัญญาณไฟฟ้าพัลส์ แต่อย่างว่าแหละราคาของระบบดังกล่าวก็จะเพิ่มขึ้นตามมาดังนั้นก็ต้องหาความสมดุลและต้องพิจารณาตามความเหมาะสม
แต่อย่างไรก็ตาม ส่วนประมวลผล & ส่วนแสดงค่าของมาตรวัดฯ ก็ควรมีขีดความสามารถในเบื้องต้นที่สามารถแยกแยะผลต่างของการสูญหายของสัญญาณไฟฟ้าได้ 1 พัลส์ ด้วยขีดขั้นหมายมาตรา (dMM) ของมาตรวัดฯ เราจึงมาตรวจสอบกัน
จากข้อมูลในการ Configuration ในส่วนประมวลผล & ส่วนแสดงค่า, Veeder Root EMR3 กำหนดค่า K-Factor = 14.663 pulses/liter และ dMM = 0.01 l เมื่อเทียบเป็นจำนวนสัญญาณไฟฟ้าพัลส์ต่อขั้นหมายมาตราจะมีค่าเท่ากับ 0.14663 Pulses/ dMM นั้นเอง ซึ่งถือว่าน้อยเกินไปอย่าลืมว่าเมื่อสัญญาณไฟฟ้าพัลส์ที่ถูกผลิตจากทรานสดิวเซอร์จะเป็นสัญญาณอนาล็อกแต่เมื่อผ่านขั้นตอนจัดการจะเป็นสัญญาณดิจิตอลเพื่อสามารถนำไปใช้งานในส่วนประมวลผล & ส่วนแสดงค่าต่อไป ดังนั้น 0.14663 pulses มันอย่างงั้นๆๆกัน ลองคิดดูครับ ดังนั้นส่วนประมวลผล & ส่วนแสดงค่ามีความไวในการประมวลผลดีจริงๆ ? ยังสงสัย
แต่หากกำหนดให้มีค่า dMM = MPEMM/10 = 0.1%*5,000 l/10 = 0.5 l เราจะได้ 14.663*0.5 = 7.3315 Pulses / dMM ก็น่าจะสวย เพราะมาตรวัดปริมาตรของเหลวชนิด Positive Displacement ขนาด 6 นิ้ว เลขลำดับประจำเครื่อง 704-1111-56 ถือเป็นมาตรวัดฯ ขนาดใหญ่ซึ่งใช้ในการซื้อขายแบบขายส่ง (Whole Sale)
จากข้อ 4 และข้อ 5 หากทำการปรับค่า K-Factor ในส่วนประมวลผล & ส่วนแสดงค่า, VEEDER-ROOT EMR3 ให้มีค่า K-Factor 11.688 pulses/liter ภายใต้เงื่อนไขขีดความสามารถถ่ายทอดข้อมูลในการประมวลผลการวัดปริมาตรของเหลวที่ 750 pulses/sec. = 750 Hz และกำหนดให้มีค่า dMM = MPEMM/10 = 0.1%*5,000 l/10 = 0.5 l เราจะได้ 11.688*0.5 = 5.844 Pulses / dMM ก็ยังดูงดีกว่า หรือจะปรับอย่างไรก็ควรมีค่ามากกว่า 2 – 3 Pulses/d ในความเห็นของกระผม
เท่าที่ทราบเราจะพบว่ามาตรวัดปริมาตรของเหลวชนิด PD โดยทั่วไปหากเป็นมาตรวัดปริมาตรของเหลวที่ใช้ในการขายปลีก (Retail Sale : ขายด้วยจำนวนปริมาตรของเหลวไม่มากกว่า 400 ลิตรต่อครั้ง) อัตราส่วนจำนวนสัญญาณไฟฟ้าพัลส์ต่อขีดขั้นหมายมาตรา (Pulses/d ) ของมาตรวัดปริมาตรของเหลวชนิด PD จะมีค่าสัดส่วนต่ำสุด 1 Pulse/d แต่หากเป็นมาตรวัดฯ ที่ใช้ในการขายส่ง (Whole Sale : ขายด้วยจำนวนปริมาตรของเหลวมากกว่า 400 ลิตรต่อครั้ง) จะมีค่า Pulses/d สัดส่วนต่ำสุดประมาณ 2 – 4 Pulses/d แต่อย่าพึ่งเชื่อผม เพราะอาจจะผิดก็ขอให้ช่วยกันตรวจสอบข้อมูลกันอีกครั้ง
FAIL
8. ตรวจสอบความสัมพันธ์ระหว่างค่าขีดขั้นหมายมาตราของถังตวงแบบมาตรา : dProver Tank , กับของมาตรวัดแบบมาตรา : dMM, และของมาตรวัดฯใช้ในการซื้อขาย : dm ว่ามีค่าขั้นหมายมาตราละเอียดเพียงพอแยกแยะค่าขั้นหมายมาตราซึ่งกันและกันอย่างเพียงพอหรือไม่ ? จำเป็นต้องมองถึงการนำมาตรวัดปริมาตรของเหลว แบบมาตรา (Master Meter) ตัวนี้นำไปใช้ตรวจสอบให้คำรับรองมาตรวัดฯใช้ในการซื้อขายต่อไป หรือพูดอีกนัยหนึ่งก็คือ ช่วยคิดขึ้นไป 1 ขั้นและคิดลงมา 1 ขั้นเมื่อเทียบกับมาตรวัดฯ แบบมาตรา นั้นเอง
รูปที่ 30 การสอบย้อนกลับของ “แบบมาตรา” และมาตรวัดปริมาตรของเหลว
จากมุมมองเรื่องการสอบย้อนกลับ (Traceability Chain) ดูรูปที่ 30 ถังตวงแบบมาตรา (Prover Tank) ถือเป็นแบบมาตราต้นน้ำถัดลงมาเป็นมาตรวัดแบบมาตรา (Master Meter) ก่อนที่นำไปใช้ตรวจสอบให้คำรับรองมาตรวัดปริมาตรของเหลวต่อไปซึ่งถืออยู่ปลายน้ำของ Traceability Chain ดังนั้นจึงจำเป็นต้องคำนึงถึงค่าขั้นหมายมาตราของถังตวงแบบมาตราที่เราใช้สอบเทียบมาตรวัดแบบมาตรา และยังต้องคำนึงถึงค่าขั้นหมายมาตราของมาตรวัดปริมาตรของเหลวที่เราใช้ในการซื้อขายที่ต้องทำการตรวจสอบให้คำรับรองเทียบกับมาตรวัดแบบมาตราด้วยเช่นกัน หลายคนเมื่ออ่านถึงจุดนี้อาจสงสัยในใจขึ้นมา อ้าว ทำไมเราไม่คำนึงถึงเรื่องอัตราเผื่อเหลือเผื่อขาดละ มาสนใจค่าขั้นหมายมาตราทำไม ขอตอบว่าเรายังคำนึงถึงอัตราเผื่อเหลือเผื่อขาดอยู่เสมอ แต่เก็บไว้ในใจชั่วคราว เพราะเราตั้งสมมุติฐานว่าโครงสร้างด้านอัตราเผื่อเหลือเผื่อขาดต้องเป็นไปในทิศทางที่มันควรจะเป็น แต่ขอให้คิดเทคนิคการทำงานเล็กน้อยว่า ขีดขั้นหมายมาตราเองก็จะสะท้อนหรือแฝงนัยของค่าอัตราเผื่อเหลือเผื่อขาดอยู่ในทีด้วยเช่นกันในกรณีปกตินะ ดังนั้นก็กล่าวถึงอัตราเผื่อเหลือเผื่อขาดต่อไปเลย สำหรับการวางโครงสร้างแบบมาตราให้เหมาะสมกับพระราชบัญญัติมาตราชั่งตวงวัด พ.ศ. 2542 และแก้ไขเพิ่มเติม โดยทั่วไปจะถือหลักปฏิบัติว่าหากพิจารณาการสอบเทียบ (Calibration) การเลือกแบบมาตราชั้นความเที่ยงสูงกว่า (STD1) ต้องมีอัตราเผื่อเหลือเผื่อขาดเมื่อเทียบกับแบบมาตราชั้นความเที่ยงต่ำกว่า (STD2) อยู่ในกรอบ MPESTD1 = MPESTD2/5-10 แต่หากพิจารณาเรื่องการตรวจสอบให้คำรับรอง (Verification) การเลือกแบบมาตรา (STD) ต้องมีอัตราเผื่อเหลือเผื่อขาดเทียบกับเครื่องชั่งตวงวัด (UUT) อยู่ในกรอบ MPESTD = MPEUUT/3
ยกตัวอย่างเช่น หากกำหนดให้ค่าขั้นหมายมาตราของมาตรวัดฯ แบบมาตรา (dMM) = 0.5 l เราจะได้ค่าขั้นหมายมาตราของแบบมาตราสูงขึ้นไป 1 ขั้นเมื่อเทียบกับมาตรวัดแบบมาตราและได้ค่าขั้นหมายมาตราของมาตรวัดที่ต้องได้รับการตรวจสอบให้คำรับรองต่ำลงไป 1 ขั้นเมื่อเทียบกับมาตรวัดแบบมาตรา โดยต้องปัดค่าขีดขั้นหมายมาตราให้อยู่ในรูปตัวเลขค่าอนุกรม 1x10n, 21x10n, 51x10n เมื่อ n = เลขจำนวนเต็มบวก, ลบ หรือศูนย์ ดังในตารางข้างล่าง
|
ถังตวงแบบมาตรา
dProver Tank
|
มาตรวัดแบบมาตรา
dMM
|
มาตรวัดใช้ซื้อขาย
dm
|
|
0.5 l/5 = 0.1 l
|
0.5 l
|
3 * 0.5 l = 1.5 l ==== 2.l
|
|
Calibration
|
|
|
|
Verification
|
จากข้อมูลถังตวงแบบมาตราพิกัดกำลัง 5,000 ลิตร มีค่าขีดขั้นหมายมาตรา 0.2 ลิตร จากข้อมูลในการ Configuration ในส่วนประมวลผล & ส่วนแสดงค่า, Veeder Root EMR3 กำหนดค่า K-Factor = 14.663 pulses/liter และ dMM = 0.01 l หรือ 0.14663 Pulses/ dMM ซึ่งถือว่า dMM มีค่าน้อยเกินไป อีกทั้งมีขีดขั้นหมายมาตราละเอียดกว่าขีดขั้นหมายมาตราของถังตวงแบบมาตราซึ่งไม่ควรเป็นเช่นนั้น จึงต้องทำการปรับค่าการแสดงปริมาตรให้มีขีดค่าขั้นหมายมาตราให้เหมาะสมและสอดรับสัมพันธ์กันที่เหมาะสมกว่านี้ จากเดิม
|
ถังตวงแบบมาตรา
dProver Tank
|
มาตรวัดแบบมาตรา
dMM
|
มาตรวัดใช้ซื้อขาย
dm
|
|
0.2 l
|
0.01 l
|
3 * 0.01 l = 0.03 l=== 0.05 l
|
อาจปรับเปลี่ยนโดยยึดหลักจากถังตวงแบบมาตรา (Prover Tank) ที่อยู่ต้นน้ำซึ่งมีอยู่จริงและไม่สามารถหาถังตวงแบบมาตราที่อ่านค่าได้ละเอียดกว่านี้ จากนั้นถ่ายทอดการวัดปริมาตรไปยังปลายน้ำคือมาตรวัดที่ใช้ในการซื้อขาย (Meter) ผ่านตัวกลางคือมาตรวัดฯ แบบมาตรา (Master Meter) จะได้ว่า
|
ถังตวงแบบมาตรา
dProver Tank
|
มาตรวัดแบบมาตรา
dMM
|
มาตรวัดใช้ซื้อขาย
dm
|
|
0.2 l
|
0.2 * 5 = 1.0 l
|
1.0 l * 3 = 3.0 l=== 5.0 l
|
|
0.2 * 3 = 0.6 l===0.5 l
|
0.5 l * 3 = 1.5 l=== 2.0 l
|
แต่ก็ไม่ใช่คำตอบสุดท้ายทั้งนี้เนื่องจากเมื่อเราตรวจสอบทรานสดิวเซอร์ที่นำมาใช้ควบคู่กับ Meter Sensor และส่วนประมวลผล & ส่วนแสดงค่า นั้นเป็น Transducer ยี่ห้อ Eltomatic รุ่น DK 9490 Type 01-09 ที่ถูกออกแบบและใช้งานกับตู้จ่ายน้ำมันเชื้อเพลิงตามสถานีบริการหรือมาตรวัดปริมาตรของเหลวที่ใช้ในการซื้อขายปลีกซึ่งมีค่าขั้นหมายมาตราในระดับ 0.01 ลิตร เริ่มมันฝรั่ง... เข้าไป.. เมื่อเราคิดว่าบุคคลากรที่ทำงานอยู่ในวงการอุตสาหกรรมปิโตรเลียมและ ผู้ที่เรียกตัวเองและทำมาหากินว่า Third Parties จะอยู่ในระดับที่คุณภาพโดยเฉลี่ยสูงกว่าคุณภาพของบุคคลากรชั่งตวงวัด (เข้าใจว่า) สามารถรักษาผลประโยชน์ของตนเองได้ สามารถสร้างสภาวะตรวจสอบถ่วงดุลในระบบจัดซื้อจัดจ้างทั้งซื้อมาตราวัดฯ และจ้างบริการสอบเทียบระบบการวัดปริมาตรของเหลวผลิตภัณฑ์ปิโตรเลียมของตนเองได้ แต่งานนี้ทำให้ผมมีทัศนคติปรับเปลี่ยนไปตามสถาปัตยกรรมสังคมและสิ่งแวดล้อมในภาคเอกชนและภาครัฐเสียใหม่แล้วครับ พบว่า...กระพริบตาไม่ได้เลย
FAIL
กลับมาอีกครั้งในกรณีที่เป็นตู้จ่ายน้ำมันเชื้อเพลิงตามสถานีบริการ ซึ่งถือเป็นการขายปลีก โดยทั่วไปมาตรวัดปริมาตรของเหลวจะเป็นชนิด Positive Displacement ขนาด Æ ½ นิ้ว มีอัตราการไหลสูงสุดในช่วง 70-90 l/min มี Cyclic Volume ประมาณ 0.5 lpr (l/round) ทำให้โรเตอร์ของมาตรวัดฯ หมุนด้วยรอบสูงสุด 90 l/min / 0.5 lpr = 180 rpm ถือว่าอยู่ในช่วงการหมุนรอบต่ำ โดยจะกำหนดค่า K-Factor ประมาณ 100 pulses/l สิครับ ตรงกัน? นั้นหมายถึงเมื่อโรเตอร์หมุนครบ 1 รอบจะให้สัญญาณไฟฟ้าพัลส์ 100 pulses/l x 0.5 lpr = 50 pulses/round และถ้าเราสังเกตตู้จ่ายน้ำมันจะมีค่าขั้นหมายมาตรา (d) ละเอียดสุดอยู่ที่ 0.01 ลิตร หรือ 10 cc ปัจจุบันผมเห็นลงไปถึง 0.001 ลิตร หรือ 1 cc เลยน่ะครับ มันเยี่ยมมากๆๆๆๆๆ เลยจอร์จ.... อัตราส่วนของจำนวนพัลส์ต่อค่าขีดขั้นหมายมาตราของตู้จ่ายน้ำมันฯจะได้ว่า 50 pulses = 0.5 l นั้นคือ 1 Pulses/d (d = 0.01 l = 10 cc) ถือว่ายอมรับได้ แต่หากเป็น 0.1 Pulses/d (d = 0.001 l = 1 cc) อันนี้เริ่มเหนื่อย... ไม่ควรหามาทำนะคนขายตู้จ่ายน้ำมันเชื้อเพลิงตามสถานีบริการ ส่วนเจ้าของปั๊มก็อย่าหามาทำด้วยเช่นกัน อย่างไรก็ขอให้นึกถึงโครงสร้างแบบมาตราที่รัฐต้องลงทุนตลอดจนอัตราเผื่อเหลือเผื่อขาดที่กฎหมายกำหนดเพราะอย่างไรก็จัดให้มาตรวัดปริมาตรของเหลวดังกล่าวนี้อยู่ในชั้นความเที่ยง 0.5 แต่ที่ห่วงก็คือความเข้าใจและการส่งสัญญาณผิดๆไปยังผู้บริโภค
สำหรับมาตรวัดปริมาตรของเหลว ชนิด PD ขนาด Æ 6 นิ้ว สำหรับใช้ในการขายส่ง โดยทั่วไปจะมีอัตราการไหลสูงสุดประมาณ 4,200 l/min มี Cyclic Volume ประมาณ 1.9 lpr (l/round) ทำให้โรเตอร์ของมาตรวัดฯ หมุนสูงสุด 4,200 l/min / 1.9 lpr = 2,210 rpm โดยจะกำหนดค่า K-Factor ประมาณ 24 pulses/l นั้นหมายถึงเมื่อโรเตอร์หมุนครบ 1 รอบจะให้สัญญาณไฟฟ้าพัลส์ 24 pulses/l x 1.9 lpr = 45.6 pulses/round และโดยทั่วไปจะมีค่าขั้นหมายมาตรา (d) ละเอียดสุดอยู่ที่ 0.2 ลิตร หรือ 200 cc เราจึงได้ว่าอัตราส่วนของจำนวนพัลส์ต่อค่าขีดขั้นหมายมาตราของตู้จ่ายน้ำมันฯ 45.6 pulses = 1.9 l ดังนั้น 4.8 Pulses/d (d = 0.2 l = 200 cc)
ทั้ง 2 ตัวอย่างที่ยกมาให้ดู เพียงเพื่อให้เกิดการพิจารณาในภาพรวมเท่านั้น โดยขอให้คำนึงถึงเทคโนโลยีในการผลิตสัญญาณไฟฟ้าพัลส์ และขีดความสามารถในการถ่ายทอดข้อมูลไปประมวลผลการวัดในอัตราที่จำกัด แต่ในความเป็นจริงก็ต้องพิจารณาเป็นรายกรณีและการเปลี่ยนแปลงของเทคโนโลยีซึ่งอาจพัฒนาไปไกลกว่าที่ผมเข้าใจในตอนนี้ก็ได้ ก็ต้องปรับปรุงความรู้ความเข้าใจกันต่อไป ต้องเรียนรู้อยู่ตลอดเวลานะ
สรุปงานนี้ต้องทำการปรับปรุงแก้ไขการ Configuration มาตรวัดปริมาตรของเหลวชนิด Positive Displacement ขนาด 6 นิ้ว เลขลำดับประจำเครื่อง 704-1111-56 ซึ่งมีอัตราการไหลสูงสุด 3,850 l/min และปรับส่วนองค์ประกอบมาตรวัดปริมาตรของเหลวคือทรานสดิวเซอร์ใหม่ให้สอดรับกับพื้นฐานการออกแบบใช้งานจริง
· ปรับค่า K-Factor เป็น 11.688 pulses/liter
· ปรับค่าขั้นหมายมาตรา (dMM) 0.5 l เพื่อให้สอดคล้องกับชั้นความเที่ยงของมาตรวัดแบบมาตรา รวมถึงการวางโครงสร้างแบบมาตราของราชอาณาจักรไทยเพื่อใช้ในการตรวจสอบความเที่ยงเครื่องชั่งตวงวัด ในที่นี้ก็คือ “มาตรวัดแบบมาตรา” และ “ถังตวงแบบมาตรา”
· เปลี่ยน Transducer ที่ใช้กับมาตรวัดปริมาตรขนาดใหญ่ ไม่ใช่ Transducer ที่ใช้กับตู่จ่ายน้ำมันเชื้อเพลิงตามสถานีบริการ ซึ่งถูกออกแบบให้ลองรับรอบการหมุนช้า แต่มีค่าความละเอียดสูง แต่งานนี้ถือว่าโชคดีที่ Transducer มันอ่านละเอียดแต่ไม่รวน ตอนที่ทำการสอบเทียบ แต่ตอนใช้งานจริงนานๆ อันนี้ก็ไม่ทราบว่าจะเกิดอาการรวนบ้างหรือเปล่า อันนี้ก็ไม่ทราบได้ แต่เอาเป็นว่าขอให้ถือหลักการที่ว่า “อุปกรณ์ใดถูกออกแบบให้ใช้งานประเภทใด ก็ขอให้นำไปใช้งานในตรงตามประเภทที่ถูกออกแบบ” ไม่ต้องคิดซับซ้อน
ที่สำคัญ ชั่งตวงวัดต้องทำการร้อยลวดผูกซีลป้องกันการปรับแต่งใดๆทั้ง Hardware และ Software ที่มีผลต่อการทำงานของมาตรวัดปริมาตรของเหลวและความเที่ยง ทั้งที่ Meter Sensor, Transducer, Calculator และ Indicating Device อย่าลืม !!!!!!!
ยังไม่ได้พูดถึงชนิดของสายสัญญาณ ความยาวของสายสัญญาณ การป้องกันการสูญหายของสัญญาณ และ ฯลฯ เอาแค่นี้ก่อน....(ไว้ให้ชั่งตวงวัดรุ่นหลัง เรียนรู้...แล้วมาเขียนปรับปรุงแก้ไขต่อ...)
จึงจบลงเพียงแค่นี้ เล่นเอาก็หลายวันเหมือนกัน ค่อยๆ เค้นออกมาได้ สำหรับกรณีศึกษานี้ .....สาธุ
ชั่งตวงวัด; GOM MOC
นนทบุรี
31 มกราคม 2566