
การตรวจสอบความเข้ากันได้ระหว่างส่วนแสดงค่ากับโหลดเซลล์
ของเครื่องชั่งไม่อัตโนมัติ
Compatibility checking of modules (Indicator & Loadcells)
of non-automatic weighing instruments
ตอนที่ 1/2
วันหนึ่ง…. มีผู้ยื่นคำขอตรวจสอบความเที่ยงฯ มาตรวัดมวลโดยตรง (Coriolis Mass Flowmeter; CMF) หรือพูดง่ายๆว่ายื่นคำขอฯ เพื่อสอบเทียบ (Calibration) CMF แต่ด้วยจากประสบการณ์ในการทำงานของชั่งตวงวัด เจอปัญหามากมายหนึ่งในปัญหาที่เรารำคาญใจคือปัญหาที่พูดภาษาชาวบ้านว่า “กูจะเอา” แต่บางครั้งชั่งตวงวัดไม่สามารถตอบสนองความอยากขอท่านไม่ไหวดังนั้นเพื่อลดปัญหาข้อโต้แย้ง หรือเกิดความเข้าใจคลาดเคลื่อน รวมทั้งลดปัญหาการสูญเสียค่าใช้จ่ายที่ไม่จำเป็น ทางชั่งตวงวัดจึงร้องขอ (ขอร้อง) เอกสารข้อมูลคุณสมบัติของเครื่องมืออุปกรณ์ตลอดจนแบบมาตราที่เราต้องเข้าไปเกี่ยวข้องเพื่อให้ใจว่าองค์ประกอบทั้งหมดที่มีผลต่อความเที่ยงของ CMF Facility ที่ใช้งานเพื่อการสอบเทียบดังกล่าวนั้นอยู่ในเกณฑ์ที่สามารถให้ผลรับการสอบเทียบที่เรามั่นใจในระดับที่ชั่งตวงวัดวางมาตรฐานไว้และออกรายงานผลการตรวจสอบความเที่ยง CMF ได้โดยชั่งตวงวัด ส่วนจะให้ชั่งตวงวัดเขียนเป็นเอกสารทุกเรื่องราวละเอียดยิบเพื่อเป็นหลักยืนยันไปทุกเรื่องว่าอะไรเป็นอะไรนั้นสงสัยไม่มี Manhour + กำลังใจ เพียงพอครับ เรายอมรับว่าไม่สามารถดำเนินการได้ครบถ้วนหรอกแต่มั่นใจว่าทุกเรื่องราวมันมีอยู่ในรูปเอกสารครบถ้วนเป็นเหตุเป็นผลในระดับหนึ่ง ข้อมูลนั่นมีอยู่แต่มันเป็นข้อมูลที่อยู่กระจัดกระจายและต้องให้เวลากับมาในการอ่านหรือเรียนรู้ ดังนั้นท่านใดไม่กระหายที่จะเรียนรู้ชอบเรียนรู้แบบกินแคปซูลอาหารเพียง 1 เม็ดแล้วรู้เข้าใจงานชั่งตวงวัดตามข้อกำหนดของกฎหมายครบถ้วนรอบด้านละก็.... นั่นนะ C13 (เดิมทีไม่มีความรู้อะไร ทำงานก็ไม่สนใจ สายตาเหลือบมองแต่การเจ้าหน้าที่เท่านั้นพอวิ่งเต้นเป็นใหญ่เป็นโตมันรู้ทุกเรื่อง แถมมีความเห็นขัดแย้งไม่ได้ด้วย 5555.) เชียวนะคุณ หลังจากที่เรียนรู้งานแล้วคุณต้องนั่งย่อยและต้องบูรณาการหรือ Integration ความรู้เพื่อนำมาใช้งาน แต่หากไม่ลงแรง...ไม่ลงสมอง.. ไม่ใส่ใจให้เวลากับการเพียรหาความรู้... ก็เรื่องของคุณ...ขอรับ
ผมนั่งชั่งใจ... และคิดอยู่นานว่า....จะเขียนเรื่องนี้ทิ้งไว้ ดีหรือเปล่า? แต่สุดท้ายก็ต้องนั่งเขียนส่วนจะเขียนได้ดีหรือไม่นั้น ค่อยๆติดตามอ่าน แต่ถ้ารู้แล้วก็ไม่ต้องอ่านครับข้ามมันไป.. เสียเวลา... เหตุผลที่ต้องกัดฟันเขียนก็เพราะว่า “สนิมเกิดแต่เนื้อในตน” !!!!
คำนิยาม “เครื่องชั่งไม่อัตโนมัติ”
ตามประกาศกระทรวงพาณิชย์ เรื่อง กำหนดชนิดและลักษณะของเครื่องชั่ง รายละเอียดของวัสดุที่ใช้ผลิตเครื่องชั่ง อัตราเผื่อเหลือเผื่อขาด ห้ามการให้คำรับรองชั้นหลัง และอายุของคำรับรอง พ.ศ. 2560
“เครื่องชั่งไม่อัตโนมัติ คือ เครื่องชั่งที่ต้องใช้ผู้ชั่งทำการชั่งในระหว่างการชั่ง”
ส่วนจะแบ่งเป็นกี่ชนิดก็ไปอ่านในประกาศกระทรวงฯ ดังกล่าวได้ ทั้งนี้สามารถเข้า Download ได้ใน www.cbwmthai.org แต่ในทางเทคนิคเราก็ขอเพิ่มอีกนิยามของเครื่องชั่งไม่อัตโนมัติอีกข้อหนึ่งนั้นคือ
เครื่องชั่งไม่อัตโนมัติต้องทำงานอยู่บนพื้นฐานหลักการของ “ความโน้มถ่วงของโลก” เท่านั้นแต่ไม่ได้บัญญัติไว้ในประกาศกระทรวงฯ นะ ตามบทนิยามหรือประกาศกระทรวงฯ ดังกล่าว (เดิมทีเป็นกฎกระทรวงฯ พ.ศ. 2546) ได้ถูกร่างอยู่บนพื้นฐานของเอกสาร OIML R76 ทำไม่ต้องเป็นเรื่องความโน้มถ่วงของโลกละ ก็เพราะว่าแบบมาตราที่ใช้ในการตรวจสอบความเที่ยงตรงและความถูกต้องของเครื่องชั่งไม่อัตโนมัติในราชอาณาจักรไทยหรือนานาอารยประเทศต่างใช้ “ตุ้มน้ำหนักแบบมาตรา (Standard Weights)” และตุ้มน้ำหนักแบบมาตราดังกล่าวก็ถูกถ่ายทอดความเที่ยงเป็นลำดับชั้นจาก BIPM ลงมายังแต่ละประเทศ สำหรับราชอาณาจักรไทยนั้นเรามี “สถาบันมาตรวิทยาแห่งประเทศไทย (National Institute of Metrology Thailand; NIMT)” เป็นตัวแทนของราชอาณาจักรไทยในการทำหน้าที่เชื่อมต่อกับ BIPM เพื่อไม่ให้ขาดตอน จนทำให้เราไม่สามารถเชื่อมต่อกับนานาอารยประเทศได้ (ดูรูปที่ 1)
รูปที่ 1 แนวคิดโครงสร้างแบบมาตราซึ่งต้องสอบย้อนกลับไปยังแบบมาตราแห่งชาติ หรือมาตรฐานแห่งชาติ จนไปถึงแบบมาตราที่เก็บไว้ที่ BIPM
สรุปก็คือ การถ่ายทอดความเที่ยง“ตุ้มน้ำหนักแบบมาตรา (Standard Weights)” ตั้งอยู่บนพื้นฐาน “แรงโน้มถ่วงของโลก” โดยมีคุณสมบัติรายละเอียดตาม OIML R111 โดยมีชั้นความเที่ยงดังในตารางที่ 1 แค่เกริ่นนำเราก็เจอเอกสารมาตรฐานที่ต้องเกี่ยวข้องเข้าไป 2 ตัวคือ OIML R76 กับ OIML R111 ดังนั้นหากพูดไปเรื่อยๆ ก็จะมีเอกสารมาตรฐานที่เกี่ยวข้องเพิ่มขึ้นเรื่อยๆซึ่งคุณๆ ที่อ่านบทความนี้หากกระหายต้องการเรียนรู้ก็ต้องตามไปอ่านต่อนะ ใครลงแรงมากก็ได้มากครับ
ตารางที่ 1 อัตราเผื่อเหลือเผื่อขาดของตุ้มน้ำหนักแบบมาตรา (Standard Weights) (OIML R111)
จากในตารางที่เราจะพบว่าชั้นความเที่ยง (Class) ถูกแบ่งย่อยจากชั้นความเที่ยงสูงสุดคือ E1 จากนั้นลดหลั่นชั้นความเที่ยงลงต่อไปเรื่อยๆจาก E2 ……….จนชั้นความเที่ยงต่ำสุดคือ M3 ถ้าหากสังเกตจะพบว่าชั้นความเที่ยง Column ที่เว้นไว้ 1 Column จะมีอัตราเผื่อเหลือเผื่อขาด (Maximum Permissible Error; MPE) เป็น 10 เท่า เช่น ชั้นความเที่ยง E1 กับ F1 จะเห็นว่า MPE ของตุ้มฯ ชั้นความเที่ยง F1 มีค่าเป็น 10 เท่าของตุ้มชั้นความเที่ยง E1 แต่พอหลุดจากชั้นความเที่ยง M1 ข้อสังเกตนี้ก็ใช้ไม่ได้ ถ้าเราอ่านคุณสมบัติของตุ้มน้ำหนักแบบมาตราในเอกสาร OIML R111 อาจเจอว่าตุ้มน้ำหนักต้องทำจากวัสดุที่ไม่เหนี่ยวนำแม่เหล็ก ทั้งนี้ก็เพราะหากเจอเครื่องชั่งที่มีหลักการทำงานใช้สนามแม่เหล็กมันก็ยุ่งสิครับ ไม่รู้ว่าค่าน้ำหนักที่เครื่องชั่งแสดงค่าออกมานั้นเกิดจากตัวตุ้มน้ำหนัก หรือบวกด้วยแรงที่เกิดจากการเหนี่ยวนำแม่เหล็ก ส่วนการกำหนดว่าตุ้มน้ำหนักต้องมีผิววัสดุคุณภาพนั้นคุณภาพนี้ก็เพื่อให้มั่นใจว่าผิวตุ้มน้ำหนักไม่สะสมฝุ่นหรือไขมันจากมือของเราที่ไปจับต้องส่งผลให้ค่าน้ำหนักมันเพี้ยนไป ดังนั้นในกรณีที่ตุ้มน้ำหนักที่มีชั้นความเที่ยงสูงจึงต้องจัดเก็บไว้ในภาชนะอย่างดีปราศจากฝุ่นและความชื้น ยิ่งตุ้มน้ำหนักชั้นความเที่ยงสูงๆ ภาชนะจัดเก็บยิ่งมีความซับซ้อนสูง (ดูรูปที่ 2)
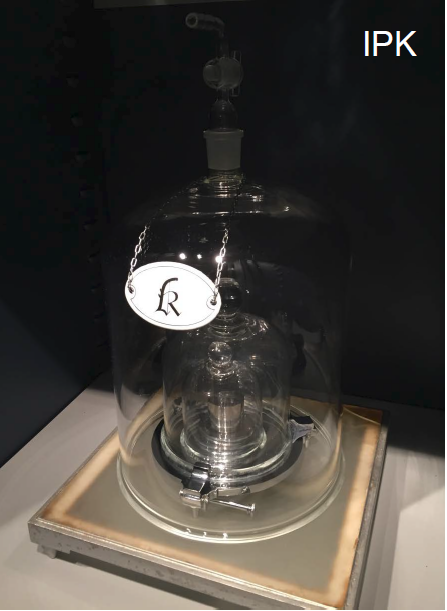
รูปที่ 2 แบบประถมสากลหน่วยกิโลกรัม (the international prototype of the kilogram) หรือคำย่อในอักษรอังกฤษ คือ IKP จัดเก็บไว้ภายในฝาครอบแก้ว (glass bell-jars) 3 ชั้น สำหรับจัดเก็บIKP
หากจะจับต้องหยิบฉวยตุ้มน้ำหนักก็ต้องมีถุงมือหรือคีมจับเพื่อลดการสัมผัสโดยตรงจากมือผู้ปฏิบัติงาน ตัวอย่างน้ำหนักตุ้มน้ำหนักเปลี่ยนแปลงไปเมื่อเวลาผ่านไปดังในรูปที่ 4 ส่วนคุณสมบัติที่ดีอีกอย่างหนึ่งคือ จุดศูนย์กลางมวล (Central Gravity; CG) ของตุ้มน้ำหนักก็ต้องได้อยู่ในตำแหน่งตามหลักการและรูปทรงทางเรขาคณิตของตุ้มน้ำหนักนั้นๆด้วย ดังนั้นเท่าที่ทราบไม่มีห้องปฏิบัติการฯ ใดในราชอาณาจักรไทยสามารถออกรายงานผลฯ และรับรองว่าตุ้มน้ำหนักที่ตนเองสอบเทียบนั้นอยู่ในชั้นความเที่ยงใด เพียงแต่สามารถออกรายงานผลว่าตุ้มน้ำหนักนั้นมีอัตราเผื่อเหลือเผื่อขาดอยู่ในชั้นความเที่ยงใดเท่านั้น การเขียนขอกำหนดงานจ้างใดในการจัดซื้อหาตุ้มน้ำหนักแบบมาตราต้องกระทำด้วยความระมัดระวัง นอกจากนี้ยังมีเรื่องปลีกย่อยหากสนใจก็ไปอ่านบทความเรื่อง “คำนิยามและความเป็นมาของหน่วยมวล (Definition and Realization of the Unit of Mass)” ใน www.cbwmthai.org เพิ่มเอานะ แต่ที่แน่ๆ วันนี้นิยาม “หน่วยมูลฐาน 7 หน่วย (7 BASE UNITS)” โดย BIPM หรือระบบหน่วย SI Unit เปลี่ยนไปแล้วครับโดยเฉพาะคำนิยาม“1 kg” ของโลกใบนี้ 1 kg ไม่ใช่ IKPหรือ Mr. (รูปที่ 2) อีกต่อไปแล้วนะ ส่วนจะใช้อะไรแทนคำนิยาม 1kg ของโลกวันนี้ลองไปหาอ่านดูนะ

รูปที่ 3 การจัดเก็บIKPที่ BIPM ชั้นกลาง IKPหรือ Mr. สำหรับ 6 Reference standard (tèmoins) แบ่งเก็บไว้ชั้นบน No.43,KI,No. 8(41) และชั้นล่างสุด No. 47, No. 7, No. 32
รูปที่ 4 แสดงการเปลี่ยนแปลงค่ามวลของ Kilogram Prototype หมายเลข 52 ซึ่งครอบครองโดย PTB (Germany) เมื่อเวลาผ่านไปจะเพิ่มขึ้นและเมื่อทำความสะอาดแล้วนำกลับไปสอบเทียบใหม่จะพบว่ามวล 1 กก.มีน้ำหนักลดกลับลงมาบ้างเล็กน้อย
ชั้นความเที่ยงเครื่องชั่งไม่อัตโนมัติ
อย่างที่ทราบกันหรือให้พูดซ้ำอีกครั้งก็คือ งานชั่งตวงวัดตามข้อกำหนดของกฎหมาย (Legal Metrology) เรานั้นในตอนร่างกฎกระทรวงฉบับเทคนิค พ.ศ. 2546 ในช่วง พ.ศ. 2539-2542 นั้นได้กำหนดหลักการไว้คือ Local + Global เลียนแบบกฎกระทรวงเดิมที่ออกภายใต้พระราชบัญญัติมาตราชั่งตวงวัด พ.ศ. 2466 คำว่า “Local” นั้นคือกำหนดลักษณะ วัสดุ อัตราเผื่อเหลือเผื่อขาดของเครื่องชั่งตวงวัดที่จัดสร้างและมีใช้อยู่แล้วเป็นเครื่องชั่งประจำถิ่น เช่น ถังทะนาน เครื่องชั่งจีน เป็นต้น การกำหนดลักษณะดังกล่าวจึงเอาแค่พอหอมปากหอมคออยู่กันได้ โดยยังมีหลักการที่เหมาะสม ส่งเสริมอุตสาหกรรมภายในราชอาณาจักรไทย ส่วนอีกหลักการคือ “Global” นั้นเป็นการกำหนดเครื่องชั่งตวงวัดที่ประเทศเจริญแล้วผลิตและจำหน่ายหรือโยนเข้ามาในเศรษฐกิจและสังคมของราชอาณาจักรไทย การกำหนดดังกล่าวก็ต้องมีลักษณะสากลเพื่อทำการคัดเครื่องชั่งตวงวัดที่ดีและเหมาะสมอีกทั้งให้มั่นใจว่าอารยประเทศเขาก็ทำเช่นเดียวกับเราเช่นกัน
สำหรับเครื่องชั่งไม่อัตโนมัติที่ประกาศอยู่ในประกาศกระทรวงพาณิชย์ฯ พ.ศ. 2560 ซึ่งได้ถูกแปลงร่างมาจากกฎกระทรวงพาณิชย์ฯ พ.ศ. 2546 นั้นก็บัญญัติอยู่บนพื้นฐานของ เอกสารมาตรฐาน OIML R76 เช่นเคยถือเป็นหลักการ “Global” ว่างั้นเถอะ หากชั่งตวงวัดเราไปยุ่งเกี่ยวข้องกับเครื่องชั่งก็ควรดำเนินการตามกรอบและแนวทางตามพระราชบัญญัติมาตราชั่งตวงวัด พ.ศ. 2542 นั้นคือคุณสมบัติและลักษณะเครื่องต้องอยู่บนพื้นฐาน OIML R76 ไม่ใช่ตามใจฉัน จะเป็นเครื่องชั่งอย่างไร ลักษณะใด ชั้นความเที่ยงใดก็ไม่สนใจที่จะรักษาหลักการ หากเป็นเช่นนั้นเขาไม่เรียกว่าเรายืดหยุ่นหรอก ขายหน้าเสียเปล่า....
ชั้นความเที่ยงของเครื่องชั่งไม่อัตโนมัติจึงแบ่งออกเป็น 4 ชั้นความเที่ยงตามตารางที่ 2 คือ
ตารางที่ 2 ชั้นความเที่ยงของเครื่องชั่งไม่อัตโนมัติ OML R76-1 : 2006(E)
ทั้งนี้มีหลักคิดที่ต้องระมัดระวังอยู่ 2 เรื่องสำหรับหลักการแบ่งชั้นความเที่ยงคือ
1. การกำหนดค่าขั้นหมายตรวจสอบให้คำรับรอง (e) โดยต้องอยู่บนเงื่อนไขดังในตารางที่ 3 ซึ่งโดยหลักการแล้วจะให้ e = d แต่ถ้าหากผู้ผลิตจะบอกว่าเครื่องชั่งไม่อัตโนมัติที่ตนเองผลิตมีความเที่ยงสูงต่ำมากน้อยเพียงใด ก็ให้ผู้ผลิตฯ ซึ่งรู้เรื่องขีดความสามารถของเครื่องชั่งฯ ตนเองดีที่สุดเป็นผู้กำหนดค่า e ผลตามมาเมื่อค่า e เปลี่ยนไปจะส่งผลกระทบถึงอีกหลายเรื่อง เช่น แบบมาตราของพนักงานเจ้าหน้าที่ที่ต้องเตรียมไปตรวจสอบให้คำรับรองให้เหมาะสมกับชั้นความเที่ยง ดังนั้นข้าราชการที่ร่างประกาศกระทรวงฯ อย่าแสดงอิทธิฤทธิ์หรือลุแก่อำนาจอวดฉลาดดีกว่าผู้ผลิตเครื่องชั่งฯ นั้นๆ โดยเด็ดขาดและอย่าไปทะลึ่งกำหนดว่าเครื่องชั่งชนิดนั้นเครื่องชั่งชนิดนี้ต้องมี e = 20 kg หรือ e = ... kg เป็นต้น เพราะมันทำลายหลักการ OIML R76 ด้วยความไม่รู้ของเรา ดังในตารางที่ 3
2. เมื่อทราบค่า e และค่าพิกัดกำลังสูงสุด (Max) แล้ว การแบ่งชั้นความเที่ยงจึงเป็นไปตามเงื่อนไขดังในตารางที่ 4 ซึ่งจะได้ค่า n และพิกัดกำลังต่ำสุด (Min) ตามมา ซึ่งถ้าหากเราทำการชั่งน้ำหนักด้วยเครื่องชั่งไม่อัตโนมัติที่มีค่าน้ำหนักต่ำกว่า Min เราจะพบว่าจะมีค่าอัตราเผื่อเหลือเผื่อขาดสูงมากเมื่อเทียบกับน้ำหนักที่ทำการชั่งที่มีค่าต่ำกว่า Min หรือที่เรียกว่า “Relative MPE” มีค่าสูงจึงไม่ควรทำการชั่งน้ำหนักที่มีค่าต่ำกว่าค่า Min
ตารางที่ 3 หลักคิดการกำหนดกำหนดค่าขั้นหมายตรวจสอบให้คำรับรอง (e) เพื่อใช้ในการแบ่งชั้นความเที่ยงของเครื่องชั่งไม่อัตโนมัติ OML R76-1 : 2006(E)
ตารางที่ 4 เกณฑ์การแบ่งชั้นความเที่ยงของเครื่องชั่งไม่อัตโนมัติ OML R76-1 : 2006(E)
ขอเล่าเรื่องเก่าๆ ไวประดับเป็นเครื่องเคียงว่า ตอนที่จัดทำการร่างกฎกระทรวงฯ ฉบับเทคนิค พ.ศ. 2546 นั้น ประมาณพ.ศ. 2539 -2542 เราก็พบว่าอยู่บนทาง 2 แพร่งคือเราจะเลือกเอาเอกสารมาตรฐาน NIST Handbook 44 Specifications, Tolerances, and Other Technical Requirements for Weighing and Measuring Devices ของค่ายไอ้กันคือ NIST หรือเลือกเอาเอกสารมาตรฐาน OIML R76 หรือเลือกเอามันมาผสมกันเพื่อจัดทำร่างกฎกระทรวงฉบับเทคนิค พ.ศ. .... ที่เป็นแกนหลักในการบังคับใช้ พรบ.ฯ ซึ่งถ้าเป็นอย่างนั้นมันคงจะเละน่าดู ทั้งนี้เนื่องจาก HB44 มีการเพิ่มชั้นความเที่ยงเครื่องชั่งไม่อัตโนมัติเพิ่มอีกชั้นเรียกว่า ชั้น IIIL (ตารางที่ 5) สำหรับเครื่องชั่งรถยนต์บรรทุก (คาดคะเนเป็นอย่างนั้น) แต่ในที่สุดเราเลือกเอกสารมาตฐาน OIML R76 อย่างเดียวจึงไม่มีชั้นความเที่ยง IIIL ให้เห็นปรากฏอยู่แต่อย่างใด ทั้งนี้ก็เพราะเพื่อให้ผู้ผลิตเครื่องชั่งรถยนต์บรรทุกเองต้องเป็นผู้บ่งบอกว่าเครื่องชั่งที่ตนเองผลิตนั้นมีชั้นความเที่ยงใด หรือเครื่องชั่งรถยนต์บรรทุกของตนเองเจ๋งๆ แค่ไหนและอยู่ในชั้นความเที่ยงใด หากผู้ผลิตเครื่องชั่งดังกล่าวบอกว่าเครื่องชั่งของตนอยู่ในชั้นความเที่ยง III มีค่า Max. 50,000 kg และค่า e = 5 kg ก็ลองดูเราก็จะทดสอบก็รู้ได้ ส่วนจะทดสอบอย่างไรก็จะค่อยๆตอบ อ่านไปเรื่อยๆ ซึ่งจะได้รู้กันว่าเครื่องชั่งที่ผู้ผลิตกำหนดดังกล่าวนั้นมีขีดความสามารถตามที่กำหนดหรือเปล่า ถ้าเป็นจริงชั่งตวงวัดเราก็ต้องเตรียมตุ้มน้ำหนักแบบมาตรา 500 kg ชั้นความเที่ย F2 ตาม OIML R111 ก็แล้วกัน 55555
เคยสอบถามอดีตผู้ร่าง OIML R76 ว่ามีหลักคิดอย่างไรที่กำหนดชั้นความเที่ยงตามตารางที่ 4 ได้คำตอบว่าเป็นผลมาจากการสำรวจผู้ผลิตโหลดเซลล์ (Analog Loadcells) ที่ผลิตให้กับผู้ผลิตเครื่องชั่งไม่อัตโนมัติ ว่าโหลดเซลล์ที่ผลิตในแต่บริษัทมีสมรรถนะของโหลดเซลล์อย่างไรบ้าง ปรากฏว่าสมรถถนะของโหลดเซลล์จะมีคล้ายๆ กันดังในรูปที่ 54 ส่งผลให้เครื่องชั่งไม่อัตโนมัติที่ใช้โหลดเซลล์ให้ผลการชั่งตาม curve C1 ดังในรูปที่ 5 ส่งผลให้ได้หลักการการแบ่งชั้นความเที่ยงดังในตารางที่ 4 และให้อัตราเผื่อเหลือเผื่อขาดตามตารางที่ 6
รูปที่ 5 กราฟสมมรรถนะของเครื่องชั่งไม่อัตโนมัติ OML R76-1 : 2006(E)
ตารางที่ 5 เกณฑ์การแบ่งชั้นความเที่ยงของเครื่องชั่งไม่อัตโนมัติ ตาม NIST Handbook 44
ตารางที่ 6 อัตราเผื่อเหลือเผื่อขาดของเครื่องชั่งไม่อัตโนมัติ OML R76-1 : 2006(E)
ชั้นความเที่ยงเครื่องชั่งไม่อัตโนมัติ & ตุ้มน้ำหนักแบบมาตรา
การเลือกใช้ตุ้มน้ำหนักแบบมาตราให้เหมาะสมกับชั้นความเที่ยงเครื่องชั่ง ในหลักการแล้วต้องเลือกใช้ตุ้มน้ำหนักแบบมาตราที่มีอัตราเผื่อเหลือเผื่อขาดน้อยกว่าหรือเท่ากับ 1 ใน 3 ของอัตราเผื่อเหลือเผื่อขาดของเครื่องชั่งไม่อัตโนมัติ (ทุกๆ ค่าผลการชั่งน้ำหนัก) อีกทั้งต้องมีคุณสมบัติตามมาตรฐาน OIML R111 ด้วย (ไม่มากก็น้อย) ยกตัวอย่างเช่น
เครื่องชั่งไม่อัตโนมัติ Max = 9,900 kg, e = 0.5 kg, n = Max/n = 9,900/0.5 = 19,800
เมื่อใช้ตารางที่ 3, ตารางที่ 4 และตารางที่ 6 จะได้ว่า
เป็นเครื่องชั่งไม่อัตโนมัติ e = d ชั้นความเที่ยง II, Max = 9,900 kg, e = 0.5 kg, nmin = 5,000 และ nmax = 100,000 และ Min = 50e = 50(0.5) = 25 kg,
|
MPE
|
m (Class II)
|
|
±0.5e = ±0.5(0.5 kg) = 0.25 kg
±1.0e = ±1.0(0.5 kg) = 0.50 kg
±1.5e = ±1.5(0.5 kg) = 0.75 kg
|
0 £ m £ 2,500 kg
2,500 kg < m £ 9,900 kg
-
|
หากใช้เครื่องชั่งไม่อัตโนมัติชั่งเครื่องนี้ที่ 6,000 kg จะมีอัตราเผื่อเหลือเผื่อขาด (MPE) ไม่เกิน ±1.0e = ±1.0(0.5 kg) = 0.50 kg นั้นหมายถึงเราต้องใช้ตุ้มน้ำหนักแบบมาตราที่มีอัตราเผื่อเหลือเผื่อขาด (MPE) £0.5 kg/3 £ 0.16 kg £ 166 g
|
MPE : Std. Weights F2
|
MPE : Std. Weights M1
|
|
500 kg * 12 ; 8 000 mg * 12 = 96 g
|
500 kg * 12; 25 000 mg * 12 = 300 g
|
เมื่อพิจารณตุ้มน้ำหนักชั้นความเที่ยง F2 ที่น้ำหนักทดสอบดังกล่าวจะมี MPE = 96 g น้อยกว่า 166 g แต่หากเลือกใช้ตุ้มน้ำหนักชั้นความเที่ยง M1 ที่น้ำหนักทดสอบดังกล่าวจะมี MPE = 300 g ซึ่งมีค่ามากกว่า 166 g จึงต้องเลือกใช้ตุ้มน้ำหนักชั้นความเที่ยงสูงกว่า F2 คำถามว่า สำนักงานกลางชั่งตวงวัด ได้เตรียมการให้มีตุ้มน้ำหนักแบบมาตราดังกล่าวแล้วหรือยัง? และผู้ผลิตกำหนด Max = 9,900 kg, e = 0.5 kg ถูกต้องหรือไม่? ใช่ครับผู้ผลิตมีสิทธิ์ที่จะกำหนดค่า Max และ e ของเครื่องชั่งที่ตนผลิตแต่ชั่งตวงวัดก็มีสิทธิ์ที่ขอคำอธิบายและตรวจสอบว่าผู้ผลิตฯ กำหนดถูกต้องหรือไม่? ได้เช่นกัน และนี้แหละคือเนื้อหาทั้งหมดในบทความนี้ที่เราจะค่อยๆเดินไปด้วยกัน
ดังนั้นจากหลักคิดดังกล่าวข้างต้น เราพอสรุปการเลือกใช้งานตุ้มน้ำหนักแบบมาตราเพื่อใช้ตรวจสอบให้คำรับรอง (Verification) เครื่องชั่งไม่อัตโนมัติมีรายละเอียดแนะนำดังในตารางที่ 7 และในกรณีใช้ตรวจสอบต้นแบบ (Type Approval) เครื่องชั่งไม่อัตโนมัติมีรายละเอียดแนะนำดังในตารางที่ 8
|
ชั้นความเที่ยงของเครื่องชั่ง
(OIML R76)
|
ชั้นความเที่ยงของตุ้มน้ำหนักแบบมาตรา
(OIML R111)
|
|
|
E1
|
E2
|
F1
|
F2
|
M1
|
M2
|
M3
|
|
|
I
|
|
¨
|
¨
|
|
|
|
|
|
|
II
|
|
|
|
¨
|
¨
|
|
|
|
|
III
|
|
|
|
|
¨
|
¨
|
|
|
|
IIII
|
|
|
|
|
|
¨
|
¨
|
|
ตารางที่ 7 ชั้นความเที่ยงของตุ้มน้ำหนักแบบมาตราที่สามารถใช้ตรวจสอบให้คำรับรอง(Verification)เครื่องชั่งไม่อัตโนมัติ
|
ชั้นความเที่ยงของเครื่องชั่ง
(OIML R76)
|
ชั้นความเที่ยงของตุ้มน้ำหนักแบบมาตรา
(OIML R111)
|
|
|
E1
|
E2
|
F1
|
F2
|
M1
|
M2
|
M3
|
|
I
|
¨
|
¨
|
|
|
|
|
|
|
II
|
|
¨
|
¨
|
|
|
|
|
|
III
|
|
|
¨
|
¨
|
|
|
|
|
IIII
|
|
|
|
¨
|
¨
|
|
|
ตารางที่ 8 ชั้นความเที่ยงของตุ้มน้ำหนักแบบมาตราเพื่อตรวจสอบต้นแบบ (Type Approval) เครื่องชั่งไม่อัตโนมัติ
ในกรณี่เราไม่สามารถจัดตุ้มน้ำหนักแบบมาตราได้ครบเต็มพิกัดกำลังของเครื่องชั่งไม่อัตโนมัติ เราสามารถใช้วัสดุสิ่งของที่มีน้ำหนักเสถียรน่าเชื่อถือ เช่น แท่นคอนกรีต ทำเป็นเสมือนตุ้มน้ำหนักที่เรียกว่า Substitution Weights ได้แต่ก็มีเงื่อนไขหลักเกณฑ์ที่ชัดเจนเช่นกัน
เราจึงแบ่งวิธีการทดสอบการชั่งออกเป็น 2 รูปแบบด้วยกันคือ
1. การทดสอบการชั่งที่ไม่ใช้น้ำหนักทดสอบอื่นแทนค่าน้ำหนักของตุ้มน้ำหนักแบบมาตรา (Weighing Test Without Using Substitution of Standard Weights) กับ
2. การทดสอบการชั่งที่ใช้น้ำหนักทดสอบอื่นแทนค่าน้ำหนักของตุ้มน้ำหนักแบบมาตรา (Weighing Test Using Substitution of Standard Weights) ร่วมกับตุ้มน้ำหนักแบบมาตรา
ดังนั้นอุปกรณ์เครื่องมือที่สำคัญจึงเป็นตุ้มน้ำหนักทดสอบ หากเรามีตุ้มน้ำหนักทดสอบที่มีพิกัดกำลังครอบคลุมตั้งแต่พิกัดกำลังต่ำสุดจนถึงพิกัดกำลังสูงสุดของเครื่องชั่ง เราก็สามารถทำการทดสอบแบบที่ 1 ได้ไม่มีปัญหาใดๆ แต่ถ้าหากไม่มีตุ้มน้ำหนักครอบคลุมตั้งแต่พิกัดกำลังต่ำสุดจนถึงพิกัดกำลังสูงสุดของเครื่องชั่งล่ะ เราก็ต้องมีเทคนิคทำงานกันบ้างละ ซึ่งเทคนิคนี้ผมไม่ได้คิดเองหรอก รับรู้และเรียบเรียงมาบอกกล่าวกับท่าน สามารถไป download ในรูป E-book มีชื่อว่า “นานาสาระชั่งตวงวัด เล่ม 3” สำนักงานกลางชั่งตวงวัด ใน www.cbwmthai.org นี้แหละ เชิญ...หากสนใจ....
หลักคิดการพิจารณาพิกัดกำลังตุ้มน้ำหนักโดยภาพรวมในการทดสอบการชั่งในส่วนของจำนวนตุ้มน้ำหนักแบบมาตรา (Standard Weights) กับน้ำหนักทดสอบอื่นแทนค่าน้ำหนักของตุ้มน้ำหนักแบบมาตรา (Substitution of Standard Weights) พิจารณาดังนี้คือ
1. จำนวนตุ้มน้ำหนักแบบมาตรา (Standard Weights)
|
พิกัดกำลังสูงสุดของเครื่องชั่ง
(Max)
|
จำนวนตุ้มน้ำหนักแบบมาตรา (kg)
(แนะนำ)
|
|
Max£ 1,000 kg
|
1,000 kg
|
+ addition tare§ + 0.1e ถึง 10e
|
|
1,000 kg <Max£ 5,000 kg
|
1,000 kg หรือ
50% Max เลือกค่ามากกว่า
|
+ addition tare + 0.1e ถึง 10e
|
|
5,000 kg <Max
|
³ 20% Max
|
+ addition tare + 0.1e ถึง 10e
|
หมายเหตุ § ในกรณีเครื่องชั่งไม่อัตโนมัติที่มีส่วนทดน้ำหนัก
2. ปริมาณน้ำหนักทดสอบอื่นแทนค่าน้ำหนักของตุ้มน้ำหนักแบบมาตรา (Substitution of Standard Weights) หากใช้น้ำหนักทดสอบอื่นแทนค่าน้ำหนักของตุ้มน้ำหนักแบบมาตราเมื่อทดสอบเครื่องชั่งที่มีพิกัดกำลังสูงสุดเกินกว่า 1 ตัน ยอมให้ใช้น้ำหนักอื่นๆที่มีค่าคงที่เพื่อแทนน้ำหนักของตุ้มน้ำหนักแบบมาตราได้แต่ทั้งนี้ขึ้นอยู่กับผลผิดของการทำซ้ำได้ (Repeatability Error) ดังในตารางข้างล่างเป็นการกำหนดความสัมพันธ์ผลผิดของการซ้ำได้กับพิกัดกำลังรวมต่ำสุดของตุ้มน้ำหนักแบบมาตราที่ควรมี โดยน้ำหนักที่เหลือเป็นน้ำหนักทดสอบอื่นแทนค่าน้ำหนักของตุ้มน้ำหนักแบบมาตราได้
ทั้งนี้การหาผลผิดของการทำซ้ำได้ (Repeatability Error) หาได้โดยวางน้ำหนักทดสอบด้วยน้ำหนักประมาณ 50% ของพิกัดกำลังสูงสุดของเครื่องชั่งบนส่วนรับน้ำหนัก 3 ครั้งติดต่อกัน
|
Repeatability Error
|
Standard Weights
(when Max> 1,000 kg)
|
|
> 0.3e
|
1,000 kg หรือ 50% Max.
|
|
£ 0.3e
|
35% Max.
|
|
£ 0.2e
|
20% Max.
|
การพิจารณาการทำงานร่วมกันของอุปกรณ์ที่เป็นองค์ประกอบที่สำคัญของเครื่องชั่งไม่อัตโนมัติเพื่อให้มีชั้นความเที่ยงตามความต้องการ
จากที่กล่าวไว้ในตอนต้นว่าตามหลักการของเอกสารมาตฐาน OIML R76 กำหนดให้ผู้ผลิตเครื่องชั่งไม่อัตโนมัติเป็นผู้กำหนดชั้นความเที่ยงของเครื่องชั่งฯ ที่ตนผลิตเองว่ามีชั้นความเที่ยงใด เครื่องชั่งฯ ที่ตนเองผลิตนั้นเจ๋งๆ แค่ไหน เราก็รับฟังไว้ในขณะเดียวกันเราก็ต้องมีขีดความสามารถในการตรวจทานสิ่งที่ผู้ผลิตกล่าวอ้างหรือบ่งบอกว่าเครื่องชั่งฯ ที่ผลิตดังกล่าวนั้นอยู่ในชั้นความเที่ยงตามที่ผู้ผลิตบ่งบอกจริงหรือไม่? ครับ ควรเป็นหน้าที่ของชั่งตวงวัดที่ต้องทำงาน เพราะคุณไปรับรองเครื่องชั่งฯ ทั้งๆที่คุณไม่รู้ว่ามันอยู่ในชั้นความเที่ยงตามที่ผู้ผลิตบ่งบอกจริงหรือไม่ นี้ไม่นับสำหรับบางคนไปกำหนดค่า Max, e, n, Min ให้เครื่องชั่งฯ นั้นๆโดยไม่ได้ตรวจสอบตรวจทานข้อกำหนดทางเทคนิคว่าถูกต้องหรือไม่ อันนี้อันตราย... อย่าหาทำ....
ดังนั้นการตรวจทานข้อมูลที่ผู้ผลิตบ่งบอกว่าเครื่องชั่งฯ ที่ตนเองผลิตนั้นอยู่ในชั้นความเที่ยงตามที่ระบุจริงหรือไม่ มันก็มีหลายวิธีการบริหาร เช่น ผู้ผลิตต้องจัดหาเอกสารที่แสดงว่าเครื่องชั่งฯ ดังกล่าวผ่านการตรวจสอบต้นแบบมาจากสถาบันฯ ที่น่าเชื่อถือ หรือผ่านการประเมิน Type Evaluation จากหน่วยงานที่น่าเชื่อถือ หรือสุดท้ายก็ประเมินด้วยตนเองจากหลักการที่ OIML R76-1 : 2006 (E) วางไว้เป็นแนวทางทำการตรวจสอบการทำงานเข้ากันได้หรือร่วมกันได้แล้วส่งมอบผลการชั่งน้ำหนักอยู่ภายในชั้นความเที่ยงตามที่ผู้ผลิตเครื่องชั่งฯ บ่งบอก หากข้อมูลใดไม่ปรากฏในเอกสารเราชั่งตวงวัดก็ร้องขอไปนะครับ หรือให้ผู้ผลิตกรอกข้อมูลคำนวณตามโปรแกรม Excell ชื่อว่า “LOAD CELL COMPATIBILITY ; W&M CANNADA (OIML R117)” ไป Download ได้ที่ E-docs ใน www.cbwmthai.org เชื่อว่าผู้ผลิตฯ ให้ความร่วมมืออย่างดีอยู่แล้ว เพราะเราลงเรือลำเดียวกันอยู่แล้ว.....
ตอนจะเขียนเรื่องนี้ก็คิดว่าจะวางโครงเนื้อเรื่องเพื่อดำเนินเรื่องไปอย่างไรดี ยอมรับว่ากำหนดโครงเรื่องในใจได้ค่อนข้างลำบากเพราะมีเรื่องรายละเอียดปลีกย่อยมาก อีกทั้งต้องมีพื้นฐานความรู้หลักการทำงานของเครื่องชั่งไม่อัตโนมัติด้วยไม่เช่นนั้นอ่าน OIML R76 ไปก็จะมึนกันไปไม่เข้าใจว่าทำไมต้องกำหนดอย่างนั้นอย่างนี้ เข้าใจภาษาอังกฤษแต่ไม่เข้าใจสาระในภาษาอังกฤษก็เป็นอุปสรรคที่สำคัญสำหรับข้าราชการไทย ดังนั้นตัวเราจึงไม่แน่ใจว่าจะเก็บเนื้อหาให้ได้หมดเพื่อส่งมอบความรู้ที่เป็น “หินรองเท้า” ให้กับคนรุ่นหลังอย่างไรก็ทนๆ กันหน่อยน่ะอาจมึนงงกันบ้าง คนกดปุ่มคีย์บอร์ด ผิดบ้างถูกบ้าง ตาลายตามอายุก็เริ่มแสดงผลให้ประจักษ์
เลยเริ่มด้วยคำถามตามหัวข้อ OIML R 76-1: 2006 (E), ANNEX F (Mandatory for separately tested modules) ซึ่งขอถือเป็นแกนหลักโดยมีสมมุติฐานว่า โหลดเซลล์เป็นชนิด “Analog Load Cell” ซึ่งถูกทดสอบว่ามีคุณสมบัติเป็นไปตาม OIML R60 นำมาจับคู่กับ “Indicator; IND” ซึ่งก็ผ่านการทดสอบและตรวจสอบแล้วมีคุณสมบัติเป็นไปตาม OIML R76-1 : 2006 (E), Annex C ดังนั้นเพื่อให้ได้เครื่องชั่งไม่อัตโนมัติตามชั้นความเที่ยง Max, e, n, และ Min ตามที่ต้องการทั้งนี้ทั้งนั้นก็ต้องมีคุณสมบัติอื่นๆให้ครบถ้วนตาม OIML R76 ด้วยเช่นกัน จึงต้องมีการเลือกชิ้นส่วนอุปกรณ์ทั้งหมดซึ่งรวมถึง Load Cells กับ Indicator; IND ให้ทำงานร่วมกันอย่างสอดคล้องและสอดรับเพื่อส่งมอบผลการชั้นให้อยู่ในชั้นความเที่ยงที่ต้องการ
แต่ก่อนอื่นเราก็ต้องเรียนรู้ธรรมชาติของเครื่องชั่งไม่อัตโนมัติที่มีอยู่ในท้องตลาด ซึ่งประชาชนทั่วไปใช้งานกันอยู่ซึ่งผ่านการเปลี่ยนแปลงและพัฒนาไปตามเทคโนโลยีและความต้องการของผู้ใช้งานมาอย่างต่อเนื่องเราจึงเจอเครื่องชั่งไม่อัตโนมัติอยู่ใน 3 รูปแบบหลักคือ
1. เครื่องชั่งแบบกลไก (Mechanical Lever Weighing Instruments)
2. เครื่องชั่งไฮบริด (Hybrid Weighing Instruments) และ
3. เครื่องชั่งอิเล็กทรอนิค (Electronic Weighing Instruments)
โดยเครื่องชั่งไม่อัตโนมัติมีองค์ประกอบที่สำคัญดังในรูปที่ 6
1. ส่วนรับน้ำหนัก (Load Receptor) คือ ส่วนของเครื่องชั่งที่ใช้รองรับสิ่งของที่ชั่ง
2. ส่วนส่งผ่านน้ำหนัก (Load Transmitting Device) คือ ส่วนของเครื่องชั่งที่ส่งผ่านแรงที่เกิดจากน้ำหนักของสิ่งของที่กระทำบนส่วนรับน้ำหนักไปยังส่วนชั่งน้ำหนัก ส่วนส่งผ่านน้ำหนักอาจเป็นระบบคาน, คมมีด, ลูกปืน, เฟื่องทดหรือกลไกต่างๆ
3. ส่วนชั่งน้ำหนัก (Load Measuring Device) คือ ส่วนของเครื่องชั่งที่ใช้ชั่งน้ำหนักของสิ่งของ โดยใช้ส่วนที่ทำให้เกิดสมดุล (equilibrium device) เพื่อถ่วงสมดุลกับแรงที่มาจากส่วนส่งผ่านน้ำหนักกระทำและนอกจากนี้อาจมีส่วนประกอบของส่วนแสดงค่าหรือส่วนพิมพ์ค่าน้ำหนัก ดังนั้นพอแบ่งองค์ประกอบของส่วนชั่งน้ำหนักตามลักษณะบทบาทหน้าที่การทำงานได้ว่า
3.1. สภาวะสมดุลย (Equipment Point) จะประกอบด้วยกลไกหรือหลักการทำงานที่แตกต่างกันออกไปเพื่อทำการหาจุดสมดุลระหว่างแรงที่มากระทำทั้งหมด ทำให้เราทราบค่าของน้ำหนักนั้นๆ เมื่อส่วนชั่งน้ำหนักเข้าสู่สภาพสมดุล เช่น สปริง, ลูกเบี้ยว, pendulums, ตุ้มถ่วง, ตุ้มเลื่อน, โหลดเซลล์, electromagnetic force เป็นต้น
3.2. เมื่อส่วนชั่งน้ำหนักที่ทำหน้าที่วัดค่าน้ำหนักได้แล้ว ส่วนชั่งน้ำหนักจะทำการรายงานผลการชั่งออกทางส่วนแสดงค่าน้ำหนัก (Indicator; INDs) จะอาจเป็นแบบอนาล็อกหรือดิจิตอล และ/หรือ ส่วนพิมพ์ค่าน้ำหนักและส่วนบันทึกผล (data storage) ก็ได้
รูปที่ 6 การเปรียบเทียบส่วนประกอบพื้นฐานของเครื่องชั่งแบบกลไก (Mechanical), เครื่องชั่งไฮบริด (Hybrid) และเครื่องชั่งอิเล็คทรอนิค (Electronic)
รูปที่7 องค์ประกอบของเครื่องชั่งไม่อัตโนมัติ OIML R76-1 : 2006 (E)
ในขณะเดียวกัน OIML R76-1 : 2006 (E) ก็กำหนดองค์ประกอบหลักที่สำคัญเครื่องชั่งไม่อัตโนมัติแยกย่อยลงไปในรายละเอียด แบ่งเป็น 2 ส่วนหลักคือ Weighing Module + Primary Display ดังในรูปที่ 7 ซึ่งประกอบด้วย
1. ส่วนรับน้ำหนัก (Load Receptor) / Mechanical and Electrical connecting elements
2. ระบบโหลดเซลล์ ( Analog Loadcells & Digital Loadcells)
3. A/D Convertor
4. Data Processing (Scaling) / Counter
5. Further Data Processing (e.g. tare, price calculation)
6. Key (s) or Keyboard to operate
7. ส่วนแสดงผลการชั่ง (Primary Display)
แต่เรามาพูดคุยหลักการทำงานขององค์ประกอบที่สำคัญของเครื่องชั่งไม่อัตโนมัติ ในอีกรูปแบบหนึ่งที่จับต้องและมองเห็นในภาคสนาม เพื่อสะดวกแก่การอธิบายในรายละเอียดและสามารถเปรียบเทียบเนื้อหากับที่พบเห็นเมื่อออกไปปฏิบัติงานจริง แบ่งออกเป็นส่วนหลักๆทางกายภาพ ได้แก่
(1.) ส่วนรับน้ำหนัก (Load Receptor)
(2.) ระบบโหลดเซลล์
(3.) ส่วนแสดงค่า (Weighing indicator; IND)
(4.) ระบบสายไฟฟ้าเชื่อมต่อระหว่างโหลดเซลล์ (Load cells) กับส่วนแสดงผลการชั่ง (Indicator; IND)
(5.) จอแสดงผลการชั่ง
(1.) ส่วนรับน้ำหนัก (Load Receptor)
ไม่ว่าจะเป็นเครื่องชั่งแบบกลไก, เครื่องชั่งไฮบริด และเครื่องชั่งอิเล็กทรอนิคต่างต้องมีส่วนรับน้ำหนัก อีกทั้งยังพบว่าส่วนรับน้ำหนักเป็นส่วนสำคัญมากส่วนหนึ่งที่มีผลต่อความเที่ยงของเครื่องชั่ง ดูรูปที่ 8 ส่วนรับน้ำหนักต้องมีความแข็งแรงทนทาน ไม่โค้งงอหรือบิดเบี้ยวอย่างเด็ดขาดทั้งนี้เพื่อทำหน้าที่ส่งถ่ายน้ำหนักทั้งหมดบนส่วนรับน้ำหนักไปยังส่วนส่งผ่านน้ำหนัก (Load Transmitting Device) จึงต้องออกแบบให้มีความแข็งแรงและมี Safety Factor; S.F. ในการออกแบบรับภาระแรงไม่น้อยกว่า 2.5 แล้วใครละจะรับผิดชอบและประกันว่าส่วนรับน้ำหนักมีความแข็งแรงสูงด้วย S.F. 2.5 ก็เจ้าของเครื่องชั่งสิครับ ต้องไปหาวิศวกรเซ็นต์รับรองว่าส่วนรับน้ำหนักมี SF 2.5 ที่พิกัดกำลังเครื่องชั่ง (Max) พนักงานเจ้าหน้าที่อย่างชั่งตวงวัดไม่ต้องไปฝึกไปฝนคำนวณ Strength, Stress, Strain, Tension, Compression, Torsion, Take Moment, Material Grade ฯลฯ เพื่อให้มีขีดความสามารถตรวจสอบส่วนรับน้ำหนักที่สามารถรองรับน้ำหนักได้ตามมาตฐานตามอารยะประเทศหรอกครับ เพราะน้อยคนนักของพนักงานเจ้าหน้าที่ชั่งตวงวัดที่จะจบ Civil Engineering คำนวณไปคำนวณมามันเดี๋ยวมันก็ผิด ผิดแล้วก็ต้องรับผิดชอบแทนเจ้าของเครื่องชั่งฯ เวรกรรมดันมาทำงานที่ตนเองไม่ถนัดแถมต้องมานั่งมึนๆกับต้องรับผิดชอบในสิ่งที่ตนเองไม่รู้จักอีก ปัญหาชีวิตแท้ๆ.. งานระบบราชการคือการตัดกระบวนงานยากๆ ให้เป็นส่วนย่อยๆ เล็กๆ หลายส่วนเพื่อให้คนที่ไม่ต้องใช้ความรู้ความสามารถสูงแต่อาศัยสอนกันเล็กน้อยและทำงานในขบวนงานนั้นๆ ซ้ำๆ บ่อยๆ จนชำนาญ (จนไม่มีใครสู้ได้...เพราะทำมา 30 ปี....) จากนั้นส่งงานต่อไปยังอีกขบวนงานย่อยๆ ถัดมาเพื่อให้มาเชื่อมโยงกันโดยไม่ต้องหาคนคุณภาพสูงมารับผิดชอบกระบวนงานที่ยากๆนั้นเพราะระบบราชการไม่มีแรงจูงใจให้คนดีและคนเก่งเข้ามารับราชการหรอกครับ ธรรมาภิบาลมันแค่อยู่ในอากาศที่บางเบาจับต้องไม่ได้ครับ ดังนั้นใครเข้ารับราชการใหม่ถ้าได้ยินว่า อย่างนั้นไม่เคยทำ อย่างนี้ติดระเบียบ อย่างนั้นต้องรอเจ้านายสั่ง...ครับ...เรื่องปกติอย่างตกใจ.... ยิ้มไว้เดินต่อไป You Never Walk Alone… ดังนั้นในเรื่องความแข็งแรงของส่วนรับน้ำหนัก ชั่งตวงวัดก็ควรแก้ไขปัญหาชีวิตด้วยการขอหนังสือรับรองจากวิศวกรผู้เซ็นต์รับรองความแข็งแรงส่วนรับน้ำหนักว่ามี S.F. 2.5 ที่พิกัดกำลังเครื่องชั่ง (Max) และหากจะกำหนดมาตรฐานขนาดของส่วนรับน้ำหนักของเครื่องชั่งนั้นก็ต้องพิจารณาเป็นกลุ่มๆไป โดยเฉพาะเครื่องชั่งไม่อัตโนมัติกลุ่มที่เป็นเครื่องชั่งรถยนต์บรรทุกเรื่องนี้เห็นควรต้องกำหนดให้เป็นมาตรฐานเดียวกันทั้งราชอาณาจักรไทยเพราะการแข่งขันราคาเครื่องชั่งรถยนต์บรรทุกมันรุนแรงเสียจนพาให้การออกแบบส่วนรับน้ำหนักในเรื่องทั้งขนาด, คุณภาพและขีดความสามารถรองรับภาระแรงบิดเบี้ยวผิดเพี้ยน สร้างความเสียหายให้กับระบบเศรษฐกิจและสังคมของราชอาณาจักรไทยมาแล้วและคงอีกต่อไป... หากไม่แก้ไข
ส่วนรับน้ำหนัก (Load receptor) ของเครื่องชั่งรถยนต์บรรทุกจะมีขนาดความกว้างที่ประมาณ 3.0 เมตร ส่วนความยาวของส่วนรับน้ำหนักมีตั้งแต่ 7.5, 9, 12, 18 และ 21 เมตร แต่ในบางครั้งส่วนรับน้ำหนักก็อาจถูกแบ่งออกเป็นส่วนย่อยๆ 2 ส่วน หรือ 3 ส่วนแทนที่จะสร้างส่วนรับน้ำหนักให้ยาวเป็นชิ้นเดียวยาวๆ ก็สุดแล้วแต่
หากส่วนรับน้ำหนักไม่แข็งแรงพอเพียงต่อการส่งถ่ายน้ำหนัก เกิดการเสียรูปทรงยืดหดตัวสาเหตุหลักคือตัวโครงสร้างและชิ้นส่วนอุปกรณ์ที่รองรับตัวโหลดเซลล์เสียรูปทรง (f1) กับตัวโครงสร้างของส่วนรับน้ำหนัก (f2) เสียรูปทรง ดังตัวอย่างในรูปที่ 8 ส่งผลให้น้ำหนักบนส่วนรับน้ำหนักสูญเสียไปกับการเสียรูปทรงการโค้งงอบิดเบี้ยวของส่วนรับน้ำหนักไปบางส่วนแต่จะสูญเสียไปมากน้อยเพียงใดค่อยว่ากันอีกที (เพราะตอนนี้ยังไม่รู้จักบอกอธิบายอย่างไรหรือคำนวณตรวจสอบอย่างไร...) ทำให้น้ำหนักที่เหลือถูกส่งผ่านไปยังส่วนส่วนชั่งน้ำหนัก (Load Measuring Device) ซึ่งไม่ใช่น้ำหนักที่แท้จริงของสิ่งของที่ปรากฏอยู่บนส่วนรับน้ำหนักของเครื่องชั่ง แล้วน้ำหนักที่หายไปมีค่าเท่าไร มีมูลค่าในแต่ละครั้งเท่าไร และมีเครื่องชั่งอย่างนี้ในราชอาณาจักรไทยกี่เครื่อง เมื่อรวมูลค่าที่เสียหายไปทั้งหมดเท่าไร ออ... ไม่มีการจัดเก็บข้อมูล ออ... ไม่ใช่นักวิจัย... ออ..จ้างดีมั๊ย แล้วจ้างเสร็จผลักดันต่อได้มั๊ย.... แล้วผลประโยชน์ตกลงอยู่กับใคร... แล้วใครเสียผลประโยชน์... แล้วระบบราชการรองรับเรื่องอย่างนี้ได้หรือไม่... ออ.. พึงฝันไปครับเราตื่นเถอะนอนกันเต็มอิ่มแล้ว.... กลับบ้านเถอะลูก (วันนี้ไม่มีข่าว).................
หากชั่งตวงวัดกำหนดให้ความแข็งแรงของส่วนรับน้ำหนักมีวิศวกรผู้เซ็นต์รับรองความแข็งแรงส่วนรับน้ำหนักว่ามี S.F. 2.5 ที่พิกัดกำลังเครื่องชั่ง (Max) เดี๋ยวจะมีขบวนการที่ชะลอ หยุด ถ่วง ออ ... ไม่ไม่ใช่โครงสร้างสาธารณะไม่ต้องมี Safety Factor สูงขนาดนั้น... ออ.. ผมมีถุงขนมมาฝาก ถ้าไม่อร่อยก็บอกน่ะ เดี๋ยวซื้อมาฝากอีกถุง... ออ ถ้าไม่เข้าใจว่าประเทศอื่นเค้าคิดอย่างไรเดี๋ยวพาไปดูงานที่ญี่ปุ้น หรือ ออสเตรเลียยยยยยย ดี..ออ... ตื่นเถอะ.. เอ็งจะฝันไปทำไม.
รูปที่ 8 ส่วนรับน้ำหนัก (Load Receptors) มีผลต่อความเที่ยงตรงของเครื่องชั่งชนิดติดตรึงกับที่
รูปที่ 9 ทางเข้าสู่ส่วนรับน้ำหนักต้องราบเรียบให้มากที่สุด (Low profile weighbridges) มีระยะทางเข้าและทางออกที่เพียงพอไม่ต้องหยุดทันทีทันใด
(2.) ระบบโหลดเซลล์ ( Analog Loadcells & Digital Loadcells)
ปัจจุบันในเครื่องชั่งรถยนต์บรรทุกเราจะพบได้ทั้งโหลดเซลล์ที่มีหลักการทำงานให้ผลการวัดแรงที่กระทำต่อโหลดเซลล์ในรูปแบบสัญญาณด้านทางออกของโหลดเซลล์เป็นชนิด Analog และชนิด Digital ซึ่งถูกเรียกแยกออกเป็น “Analog Loadcells” กับ “Digital Loadcells” ดังในรูปที่ 10 และรูปที่ 11 แต่กรอบการพูดคุยเนื้อหาของบทความนี้เราตีกรอบเนื้อหาไว้ที่เฉพาะ “Analog Loadcells” กับเครื่องชั่งรถยนต์บรรทุก
รูปที่ 10 ระบบโหลดเซลล์ชนิด “Analog Load Cell”
รูปที่ 11 ระบบโหลดเซลล์ชนิด “Digital Load Cell”
รูปที่ 12 การใช้งานระบบโหลดเซลล์เป็นชนิด “Analog Load Cell” กับเครื่องชั่งบรรทุกรถยนต์
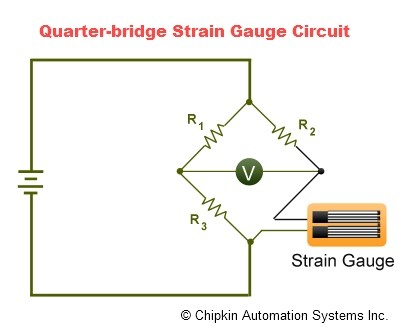
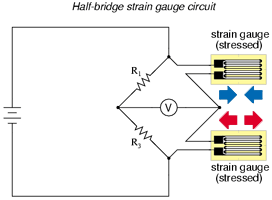
ภายในเครื่องชั่งไม่อัตโนมัติที่มี Analog Load Cell ทำหน้าที่เป็นตัวตรวจสอบปริมาณภาระแรงนั้น ในการทำงานของ Analog Load Cell ซึ่งจะมี Strain Gauges จำนวนอย่างน้อย 4 ตัวเชื่อมติดอยู่กับแท่งโครงโลหะ (a metal frame) ในตำแหน่งที่แม่นยำ รูปร่างของ Strain gauge จะเป็นเส้นลวดขดไปมาเป็นรูปร่างต่างๆ แล้วแต่วัตถุประสงค์การใช้งาน ดูรูปที่ 13 และรูปที่ 14 Strain gauge ทั้ง 4 ตัวมีการต่อเชื่อมทางไฟฟ้าด้วยวงจรวีทสโตนบริด (Wheatstone Bridge Circuit) รูปที่ 15 โดย Strain gauges จะเป็นตัวตรวจสอบปริมาณภาระแรงเนื่องจากน้ำหนัก ด้วยค่าความต้านทานที่เปลี่ยนแปลงไปใน Strain gauges ส่งผลให้วงจรวีทสโตนบริดปรับเปลี่ยนระบบเข้าสู่สมดุลใหม่ ก่อนแปลงค่าออกเป็นค่าแรงดันไฟฟ้าด้านทางออกของวงจรวีทสโตนบริด
รูปที่ 13 ลักษณะ Strain gauges รูปแบบต่างๆ
รูปที่ 14 ตัวอย่างคุณสมบัติของ Strain gauges ที่ควรแสดงไว้สำหรับชุดการผลิตหนึ่ง
การกระตุ้นโหลดเซลล์ (Excitation of load cell) หรือวงจรวีทสโตนบริดของชุด Strain gauges ของโหลดเซลล์ที่มีขายอยู่ในท้องตลาดนั้นจะมีให้เลือกแหล่งพลังงานที่ใช้เพื่อกระตุ้นโหลดเซลล์ 2 แบบคือ รูปแบบการกระตุ้นด้วยไฟฟ้ากระแสสลับ (AC excitation) และการกระตุ้นด้วยไฟฟ้ากระแสตรง (DC excitation) และในขณะเดียวกันการกระตุ้นด้วยไฟฟ้ากระแสตรงก็แบ่งย่อลงต่อไปอีก 2 รูปแบบคือ Uni-polarity mode และ Dual-polarity mode ส่วนรายละเอียดเป็นอย่างไรไปหาอ่านต่อนะ
กรณีใช้การกระตุ้นโหลดเซลล์ด้วยไฟฟ้ากระแสสลับ (AC excitation) จะช่วยลดปัญหา Thermocouple effects ของการเชื่อมต่อของระบบสายไฟ แต่การเปลี่ยนแปลง Capacitance ในสายไฟฟ้า หรือการเหนี่ยวแรงดันไฟฟ้า (Induced voltage) และปัจจัยอื่นๆ ที่เกิดขึ้นส่งผลกระทบต่อความไม่สมดุลของวงจรวีทสโตนบริดของตัวโหลดเซลล์ และส่งผลให้มีผลผิดในการชั่งไม่คงที่ ทำให้ผู้ผลิตเครื่องชั่งฯ หันไปใช้การกระตุ้นโหลดเซลล์ (วงจรวีทสโตนบริด) ด้วยไฟฟ้ากระแสตรง (DC excitation) เนื่องจากสามารถรักษาสมดุลของวงจรวีทสโตนบริดได้ดีกว่า แต่ก็ยังมีปัญหาในเรื่องความเสถียรของแรงดันไฟฟ้ากระแสตรงเช่นกัน แต่ก็ถูกแก้ไขปัญหาด้วยการติดตั้งแรงดันไฟฟ้ากระแสตรงอ้างอิง (Reference Voltage) เพื่อช่วยตรวจติดตามแรงดันไฟฟ้ากระแสดตรงที่ไฟกระตุ้นวงจรวีทสโตนบริดของตัวโหลดเซลล์ให้คงที่อยู่ตลอดเวลาด้วยวงจรเปรียบเทียบแรงดันไฟฟ้ากระตุ้นโหลดเซลล์กับแรงดันไฟฟ้าอ้างอิงและทำการปรับเพิ่มลดแรงดันไฟฟ้ากระตุ้นโหลดเซลล์ให้คงที่ อีกทั้งยังมีไมโครคอมพิวเตอร์ทำการแก้ไขในขั้นตอน digitize ควบคู่กับการรักษาอัตราส่วนแรงดันไฟฟ้าด้านทางออกต่อแรงดันไฟฟ้ากระตุ้น (mV/V) ซึ่งผู้ผลิตเครื่องชั่งที่ดีก็ต้องหา และดำเนินการในสิ่งที่ต้องทำ หากยังต้องการสร้าง “Branding”
รูปที่ 15 ลักษณะการติดตั้ง Strain gauges ของโหลดเซลล์
เมื่อมีแรงมากระทำต่อโหลดเซลล์หรือตัวแท่งโครงโลหะซึ่งมี Strain gauges ติดตั้งและต่อเชื่อมเป็นวงจรวีทสโตนบริด จะเกิดการหดตัวและยืดตัวของ Strain Gauges ตามแท่งโครงโลหะมีมันติดอยู่ส่งผลให้เกิดการเปลี่ยนแปลงค่าความต้านทานของส่วนที่เป็นขดลวดของ Strain gauges ทั้ง 4 ตัวที่เชื่อมต่อเป็นวงจรวีทสโตนบริด ด้วยเหตุนี้วงจรไฟฟ้าวีทสโตนบริดซึ่ง Strain gauges ทั้ง 4 เชื่อมต่อระหว่างกัน (ดูรูปที่ 16) เกิดเสียความสมดุลทางไฟฟ้าอันเนื่องจากการเปลี่ยนแปลงของความต้านทานโดยเป็นสัดส่วนที่แม่นยำมากเมื่อเทียบกับภาระแรงซึ่งกระทำต่อแท่งโครงโลหะที่เปลี่ยนแปลงไปและก่อให้เกิดสัญญาณไฟฟ้าด้านออกของตัวโหลดเซลล์มีความสัมพันธ์ลักษณะเป็นเชิงเส้น (linear output signal) เมื่อเทียบกับภาระแรงที่กระทำบนโหลดเซลล์ (ดูรูปที่ 17 (b)) จึงให้ผลการวัดน้ำหนักของเครื่องชั่งด้วยความแม่นยำ โดยทั่วไปแรงดันไฟฟ้า (V) และกระแสไฟฟ้า (A) ของโหลดเซลล์ที่ส่งออกมานั้นมีค่าอยู่ระหว่าง 10 - 20 V และ 200 – 400 mA ทั้งนี้และทั้งนั้นต้องตรวจสอบข้อมูลที่จากผู้ผลิตอีกครั้งหนึ่ง
แรงดันไฟฟ้าของสัญญาณด้านทางออกของโหลดเซลล์ นี้มีค่าต่ำมากเมื่อเทียบกับแรงดันไฟฟ้าด้านเข้าหรือแรงดันไฟฟ้ากระตุ้น (Excitation voltage) โดยทั่วไปแรงดันไฟฟ้าของสัญญาณด้านทางออกของโหลดเซลล์จะมีค่าอยู่ในช่วงระหว่าง 1 ถึง 3 Millivolts ต่อ 1 Excitation Volt ในขณะที่แรงดันกระตุ้น (Excitation voltage) ซึ่งอาจจะเป็นไฟฟ้ากระแสตรง (DC) หรือไฟฟ้ากระแสสลับ (AC) ก็ได้มีค่าแรงดันไฟฟ้าอยู่ในช่วง 5 ถึง 25 Volts ดังนั้นการออกแบบแหล่งจ่ายแรงดันไฟฟ้ากระตุ้น, ตัวขยายสัญญาณ (amplifiers) และอุปกรณ์ร่วมต่างๆ ให้เหมาะสมและสอดคล้องกันนั้นจึงมีความสำคัญต่อความแม่นยำของเครื่องชั่งด้วยเช่นกัน
รูปที่ 16 การต่อเชื่อมเป็นวงจรไฟฟ้าวีทสโตนบริด (Whetstone Bridge Circuit) ของ Strain gauges
เรามาดูภาพรวมหลังจากที่พูดถึงหลักการทำงานของโหลดเซลล์ไปบ้างแล้วว่า หากโหลดเซลล์ที่มี Rated load cell output 1 -3 mV/V นั้นหมายถึงมีแรงดันไฟฟ้าด้านทางออกโหลดเซลล์ 1 – 3 mV ต่อแรงดันไฟฟ้ากระตุ้น 1 V ดังนั้นหากโหลดเซลล์มีแรงดันไฟฟ้ากระตุ้นกระแสตรงเท่ากับ 10 V จะทำให้แรงดันไฟฟ้าสูงสุดด้านทางออกโหลดเซลล์เท่ากับ 10 – 30 mV หากสมมุติให้แรงดันไฟฟ้าสูงสุดเท่ากับ 20 mV และเครื่องชั่งรถยนต์บรรทุกใช้โหลดเซลล์จำนวน 4 ตัว ดังนั้นจะมีแรงดันไฟฟ้าด้านทางออกโหลดเซลล์มีค่าเท่ากับ 4 x 20 mV = 80 mV อย่างไรก็ตามต้องคำนึงถึงน้ำหนักของส่วนรับน้ำหนักของเครื่องชั่ง โดยทั่วไปเราพบว่าน้ำหนักของส่วนรับน้ำหนักและรวมถึง Dead load ต่างๆรวมกันแล้วจะตกอยู่ที่ประมาณ 25% ของพิกัดกำลังของโหลดเซลล์ทั้งหมด ดังนั้นเราจะมีค่าช่วงการชั่งน้ำหนักที่เหลือของโหลดเซลล์อยู่ในช่วง 80 – 0.25(80) = 60 mV (0 – 60 mV) ดังนั้นหากเครื่องชั่งรถยนต์บรรทุกมีช่วงการชั่งน้ำหนัก 0 – 30,000 kg เครื่องชั่งฯมีจำนวนช่องขั้นหมายแบบมาตรา (n) 3,000 ช่อง (Max/e) ดังนั้นเครื่องชั่งจะมีค่าขั้นหมายมาตรา (d) = 10 kg โดยมีค่าแรงดันไฟฟ้าด้านทางออกโหลดเซลล์เท่ากับ 20 mV/d (60/3,000 = 0.02 mV)
สำหรับสัญญาณไฟฟ้ารบกวน (Electric noise) ที่มีต่อเครื่องชั่งนั้น พบว่าสายไฟฟ้ากำลังที่จ่ายไฟฟ้าให้เครื่องชั่งฯ ทำงานอยู่นั้นทำหน้าที่เสมือนเสาอากาศในการรับเอาสัญญาณไฟฟ้ารบกวน (Electric noise) เข้ามา โดยแหล่งกำเนิดสัญญาณไฟฟ้ารบกวนมาจาก เช่น สัญญาณรบกวนจากความถี่สัญญาณวิทยุ, ทีวี, โทรศัพท์มือถือ นอกจากนี้ยังอาจเกิดจากการเหนี่ยวนำคลื่นแม่เหล็กไฟฟ้าที่ผลิตจากเครื่องทำความร้อน, เครื่องปรับอากาศ, มอเตอร์ไฟฟ้า เป็นต้น ซึ่งสัญญาณไฟฟ้ารบกวนดังกล่าวอาจไปรบกวนสัญญาณที่เกิดจากการทำงานของเครื่องชั่งอยู่ที่ระดับ 8 – 10 mV (7,000 Hz - 50 MHz) ดังนั้นเพื่อให้ผลการชั่งน้ำหนักสามารถทำงานให้ผลการชั่งน้ำหนักที่เสถียร ค่าแรงดันไฟฟ้าด้านทางออกโหลดเซลล์ต่อค่าขั้นหมายมาตรา (d) ต้อง/ควร มีค่าสูงกว่าสัญญาณรบกวน (Electric noise) ในกรณีตัวอย่างที่ยกมาพบว่าเครื่องชั่งนี้มีค่าค่าแรงดันไฟฟ้าด้านทางออกโหลดเซลล์ต่อค่าขั้นหมายมาตรา (d) เท่ากับ 20 mV/d ( > 8 – 10 mV ) OK.
รูปที่ 17 อิทธิพลของอุณภูมิมีผลต่อการรักษาศูนย์และ Sensitivity ของวงจรไฟฟ้าวีทสโตนบริด (a) และ Linearity error (b)
เนื่องจากอิทธิพลของอุณภูมิมีผลต่อการรักษาศูนย์หรือรักษาสมดุลของวงจรไฟฟ้าวีทสโตนบริดรวมทั้ง Sensitivity ของวงจรไฟฟ้าวีทสโตนบริด หากความสมดุลของวงจรฯ สูญเสียไปจะทำให้เกิดปรากฏการณ์ส่งผลให้เกิดการ drift ของสัญญาณด้านออกของโหลดเซลล์เมื่ออยู่ในสภาวะไม่มีภาระโหลดกระทำและในสภาวะที่มีโหลดกระทำทั้งนี้จะเห็นได้ชัดเจนเมื่อภาระโหลดเกิดขึ้นที่พิกัดกำลังสูงสุดของโหลดเซลล์ ดังในรูปที่ 17 (a) ในบางผู้ผลิตจึงได้มีการออกแบบวงจรไฟฟ้าวีทสโตนบริดที่มีการชดเชยการเปลี่ยนแปลงของอุณหภูมิดังในรูปที่ 18
รูปที่ 18 Hysteresis ของวงจรไฟฟ้าวีทสโตนบริดของโหลดเซลล์
รูปที่ 19 การต่อเชื่อมเป็นวงจรไฟฟ้าวีทสโตนบริดที่ซับซ้อนด้วยตัวชดเชยปัจจัยต่างๆ ของ Strain gauges
สมรรถนะของโหลดเซลล์ (Load Cell Performance) ที่ควรจับตาดู
1) พิกัดกำลัง (Capacity) ที่พิกัดกำลังที่ 70% ของพิกัดกำลังเป็นตำแหน่งที่กำหนดให้โหลดเซลล์มีผลผิด (error) เท่ากับศูนย์ รูปที่ 20
2) ความไว (Sensitivity)
3) แรงดันไฟฟ้ากระตุ้น (Excitation)
4) ความเป็นเชิงเส้น (Linearity)
5) ผลผิด (Maximum permissible error) ตาม OIML R60 กำหนดผลผิดของโหลดเซลล์ไว้มีค่าไม่เกิน 70% MPE (Maximum permissible error) ของเครื่องชั่งไม่อัตโนมัติที่ใช้โหลดเซลล์นั้นๆ โดยยังยอมให้อีก 30% สำหรับการประกอบติดตั้งเข้ากับเครื่องชั่งและปัจจัยสิ่งแวดล้อมอื่นๆ
6) Hysteresis
7) สมรรถนะของโหลดเซลล์และอิทธิพลของอุณหภูมิต่อการแสดงค่าศูนย์และความไวของโหลดเซลล์ (Temperature effect on Zero and Sensitivity) ดูรูปที่ 17
8) Effect of creep on Zero and maximum capacity ดูรูปที่ 21
9) อิทธิพลของความชื้น (Effect of humidity)
10) อิทธิพลของความดันต่อการแสดงค่าศูนย์ (Effect of barometric pressure on Zero)
11) ความสามารถทำซ้ำได้ (Repeatability)
รูปที่ 20 สมรรถนะของโหลดเซลล์ที่ถูกทดสอบภายใต้อุณหภูมิทดสอบที่แตกต่างกัน
รูปที่ 21 ผลการทดสอบโหลดเซลล์เนื่องจากการทดสอบการคราก (creep) เมื่อเวลาผ่านไปภายใต้อุณหภูมิทดสอบที่แตกต่างกัน
(3.) ส่วนแสดงค่า (Weighing indicator; IND)
ส่วนแสดงค่า (Weighing Indicator; IND) เมื่อทำงานร่วมกับ Analog Load Cell ภายใต้การทำงานของไมโครคอมพิวเตอร์และโปรแกรมที่ออกแบบไว้เพื่อให้ผลการชั่งที่แม่นยำจึงมีอุปกรณ์ที่สำคัญหลายตัวภายในส่วนแสดงค่า; IND ทำงานร่วมกันเพื่อขยายและกรองสัญญาณซึ่งส่งออกมาจากโหลดเซลล์ ปรับเปลี่ยนสัญญาณจากแบบอนาล็อกเป็นแบบดิจิตอลก่อนส่งสัญญาณดังกล่าวให้คอมพิวเตอร์ทำการประมวลผล จนกระทั่งผลการชั่งปรากฏขึ้นสู่จอแสดงค่าของเครื่องชั่ง
องค์ประกอบของ Indicator; IND (OIML R76-1 : 2006 (E)) ดูรูปที่ 22 และรูปที่ 23 ประกอบด้วย
(1) ADC (Option)
(2) Data processing (scaling)
(3) Further data processing (e.g. tare, price calculation) (Option)
(4) Key(s) or keyboard to operate (Option)
(5) Primary display
ทั้งนี้องค์ประกอบของส่วนแสดงค่า (Weighing indicator; IND) ที่ต้องมีคือ Data processing (scaling) กับ Primary display ส่วนที่เหลือจะมีหรือไม่มีก็ได้ขึ้นอยู่กับผู้ผลิตเครื่องชั่งฯ นั้น หรือที่เรียกว่า “Option”
รูปที่ 22 องค์ประกอบการทำงาน Indicator; IND (OIML R76-1 : 2006 (E))
รูปที่ 23 ไดอะแกรมการทำงานของส่วนแสดงค่า (Weighing indicator; IND) แบบอิเล็คทรอนิค
เพื่อจะอธิบายการทำงานแต่ละส่วนภายใน ส่วนแสดงค่า (Weighing indicator; IND) จึงขอให้พยายามเข้าใจหลักการทำงาน ซึ่งอาจมีวิธีการเรียกชื่อขั้นตอนการทำงานที่แตกต่างกัน แต่ก็ไม่อยากทิ้ง OIML R76-1 : 2006 (E) ด้วยเหตุนี้จึงเอารูปที่ 22 และรูปที่ 23 มาเทียบเคียงดูควรคู่กันไปและเปรียบเทียบการเรียกชื่อแต่ละขั้นตอนจากนั้นค่อยโอนความคิดทั้งหมดไปทาง OIML R76-1 : 2006 (E) เนื่องจากผู้เขียนมีพื้นฐานความเข้าใจไปในทางรูปที่ 23 และมีรูปภาพและข้อมูลไปทางนั้นไม่อยากเสียเวลาไปปรับเปลี่ยนเข้าหา OIML R76-1 : 2006 (E) แต่จากที่พิจารณาแล้วพบว่าแทบจะเป็นเรื่องเดียวกันแต่อาจเรียกชื่อ หรือใช้ชื่อเรียกแตกต่างกัน อาจมีบางที่แตกต่างกันออกไป ถือเป็นเรื่องปกติเพราะเป็นองค์ความรู้ของชาติตะวันตก เรามาดูรูปที่ 23 เริ่มต้นตั้งแต่สัญญาณด้านทางออกโหลดเซลล์ที่ให้เป็นสัญญาณอนาล็อกแรงดันไฟฟ้ามีค่าเป็น mV ถือว่าเป็นสัญญาณที่อ่อนและมีแนวโน้มที่จะสูญเสียหรือถูกแทรกแซงรบกวนจากสัญญาณภายนอก ดังนั้นจึงต้องมีตัวขยายสัญญาณ (Amplifier) เพื่อนำสัญญาณอนาล็อกแรงดันไฟฟ้าไปใช้งานได้ต่อไปหรือเพื่อต้องการส่งสัญญาณให้ได้ระยะทางไกลออกไป เป็นต้น งานนี้ถ้าไม่มีการพัฒนาองค์ความรู้ด้านตัว IC (Integrated Circuit) เรื่องโหลดเซลล์แทบไม่ต้องพูดถึงต้องใช้ระบบคานทดกันต่อไป
(1) ตัวขยายสัญญาณ (Amplifier) ทำหน้าที่ขยายสัญญาณด้านทางออกของโหลดเซลล์ซึ่งเป็นสัญญาณอนาล็อกแรงดันไฟฟ้ามีค่าเป็น mV ซึ่งเป็นสัญญาณแรงดันฟ้าที่อ่อนมากมีค่าอยู่ประมาณ 10 - 20 mV ทำการขยายสัญญาณไปเป็น 100 - 1,000 เท่า ทั้งนี้และทั้งนั้นขึ้นอยู่กับแรงดันไฟฟ้าด้านทางเข้าของตัวแปรสัญญาณอนาล็อกไปเป็นดิจิตอล (A/D Converter) ที่ออกแบบไว้ จากนั้นสัญญาณอนาล็อกแรงดันไฟฟ้าถูกส่งต่อไปยัง Low-pass filter แต่ถ้าหากเป็นเครื่องชั่งไม่อัตโนมัติระยะห่างระหว่างโหลดเซลล์กับ A/D Converter ไม่มากนักก็อาจไม่มีตัวขยายสัญญาณดังรูปที่ 22
รูปที่ 24 วงจรขยายสัญญาณแบบกลับเฟส (Inverting Amplifier) กับวงจรขยายสัญญาณแบบไม่กลับเฟส (Noninverting Amplifier)
วงจรขยายสัญญาณมีอยู่หลากหลายรูปแบบ วงจรขยายสัญญาณด้านทางออกของโหลดเซลล์ที่ได้รับความนิยมและบรรจุอยู่ในส่วนแสดงค่า (weighing Indicator; IND) คือ วงจรขยายสัญญาณแบบ “ออปแอมป์ (Op-Amp; Operational Amplifier)” เนื่องจากวงจรประกอบด้วย IC (Integrated Circuit) จึงง่ายต่อการออกแบบและผลิตใช้งาน
(2) ตัวกรองสัญญาณย่านความถี่สูง (Low-pass filter) ทำหน้าที่กรองสัญญาณรบกวนเช่น สัญญาณความถี่สูงอันเกิดจากสัญญาณแทรกซ้อนจากคลื่นแม่เหล็กไฟฟ้า (electric-magnetic interference) ช่วงความถี่ (Frequency range) 80 MHz - 2,000 MHz จากนั้นจะรักษาส่วนของสัญญาณที่ต้องการให้คงที่
วงจรกรองความถี่ชนิดความถี่ต่ำผ่าน (Low-pass filter) ของส่วนแสดงค่าของเครื่องชั่ง มักจะเป็นวงจร active filter โดยรวมเอาวงจรขยายสัญญาณแบบ “ออปแอมป์ (Op-Amp; Operational Amplifier)” โดยใช้ตัวเก็บประจุ (C) เป็นตัว block สัญญาณความถี่สูงเนื่องจากตัวเก็บประจุ (C) จะมีคาปาซิทีฟรีแอคแตนซ์ (Capacitive Reactance) (XC) ลดลงตามความถี่ ส่งผลให้เฉพาะสัญญาณไฟฟ้าอนาล็อกช่วงความถี่ต่ำผ่านไปประมวลผลต่อได้
รูปที่ 25 เปรียบเทียบสัญญาณอนาล็อกดิบจากตัวขยายสัญญาณจากนั้นทำการกรองสัญญาณย่านความถี่สูงออกไป สุดท้ายทำการปรับแต่งสัญญาณให้ราบเรียบเพื่อแสดงค่าผลการชั่งต่อไป
(3) ตัวแปลงสัญญาณอนาล็อกเป็นดิจิตอล (A/D Converter) เพื่อความชัดเจนเรามาดูนิยามสัญญาณอนาล็อกกับสัญญาณดิจิตอล
สัญญาณอนาล็อก (Analog Signal) หมายถึงสัญญาณข้อมูลแบบต่อเนื่อง (Continuous Data) มีขนาดของสัญญาณไม่คงที่ การเปลี่ยนแปลงขนาดของสัญญาณแบบค่อยเป็นค่อยไป กล่าวคือต้องแปรผันตามเวลา โดยทั่วไปคือสัญญาณที่มนุษย์สามารถสัมผัสได้ เช่น แรงดันของน้ำ ค่าของอุณหภูมิ หรือความเร็วของรถยนต์ เป็นต้น
สัญญาณดิจิตัล (Digital Signal) หมายถึงสัญญาณข้อมูลแบบไม่ต่อเนื่อง (Discrete Data) มีขนาดของสัญญาณคงที่ การเปลี่ยนแปลงขนาดของสัญญาณเป็นแบบทันทีทันใด กล่าวคือ ไม่แปรผันตามเวลา โดยทั่วไปคือสัญญาณที่มนุษย์ไม่สามารถสัมผัสได้ เช่น สัญญาณไฟฟ้า เป็นต้น
ดูรูปที่ 23 หลังจากทำการขยายสัญญาณแรงดันไฟฟ้าด้านทางออกของโหลดเซลล์ซึ่งเป็นสัญญาณอนาล็อกที่อ่อนให้ได้แรงดันไฟฟ้าตามที่ A/D Converter ต้องการจากนั้นทำการกรองสัญญาณรบกวนย่านความถี่สูงออกไปเป็นที่เรียบร้อยแล้ว สัญญาณอนาล็อกดังกล่าวก็จะถูกแปลงจากสัญญาณอนาล็อก (แรงดันไฟฟ้า) เป็นสัญญาณดิจิตอลโดยตัวแปลงสัญญาณอนาล็อกเป็นดิจิตอล (A/D Converter) ตัวอย่างเช่น A/D Converter ต้องการแรงดันไฟฟ้าด้านทางเข้า A/D Converter เท่ากับ 2.5 – 10 V มีความละเอียดของสัญญาณ (Rresolution rate) เท่ากับ 16 – 20 digits หรือแปลงสัญญาณด้านทางเข้า (input) ที่เป็นอนาล็อกให้เป็นจำนวนจำกัดของดิจิตอลบิท (Bit ; จำนวนตัวเลขฐานสอง) เช่น 16 Bits ซึ่งเท่ากับ 216 = 65,536 ค่า นั้นหมายถึง A/D Converter สามารถแยกย่อยค่าสัญญาณอนาล็อก 2.5 – 10 V แปลงเป็น “word” ของสัญญาณดิจิตอลได้ 65,536 คำ แต่ละคำมีระยะห่างกันเทียบกับสัญญาณอาล็อกในระดับ mV
รูปที่ 26 กระบวนการสุ่ม (sample) สัญญาณด้านทางเข้า (input) ที่เป็นอนาล็อกให้เป็นจำนวนจำกัดของดิจิตอลบิทภายใน A/D Converter
ในขั้นตอนการแปลงสัญญาณอนาล็อกเป็นสัญญาณดิจิตอลต้องใช้เวลาและผ่านกระบวนการสุ่มสัญญาณ (sample) ของสัญญาณด้านทางเข้า (input) ที่เป็นอนาล็อกให้เป็นจำนวนจำกัดของดิจิตอลบิท A/D Converter จึงต้องการกระบวนการซิงโครไนส์ (เทียบกับเวลา) ที่แน่นอนและแม่นย่ำ จึงจำเป็นต้องมีวงจรแหล่งกำเนิดสัญญาณนาฬิกา (ดูรูปที่ 26)
ปัจจัยที่มีความสัมพันธ์อย่างใกล้ชิดและมีผลต่อการทำงาน A/D Converter ได้แก่ ความถี่ของสัญญาณด้านทางเข้า (input), ค่าเวลาในการเปลี่ยนสัญญาณที่เสียไปในการสุ่มตัวอย่างและอัตราการสุ่มตัวอย่างสัญญาณ เท่าที่ทราบมีวิธีการทำงานของ A/D Converter มีอยู่ 6 วิธีสำคัญๆ คือ
ก. Flash Techniques (Parallel) เทคนิคแบบแฟลช
ข. Single Slop Techniques (single-ramp) เทคนิคแบบสโลปเดี่ยว
ค. Double Slop Techniques (Dual slop, Dual-ramp or Integrating) เทคนิคแบบสโลปคู่
ง. Single Counter Techniques เทคนิคแบบเคาเตอร์เดียว
จ. Tracking Counter Techniques เทคนิคแบบแทร็คกิ้งเคาเตอร์
ฉ. Successive Approximation Techniques เทคนิคแบบประมาณค่าหลายครั้ง
รูปที่ 27 ตารางเปรียบเทียบการทำงานที่หลักการทำงานแตกต่างกัน
ไม่สามารถที่จะอธิบายหลักการทำงานของ A/D Converter ให้ครบถ้วนทุกวิธีการทำงานจึงเลือกเอาเฉพาะวิธีการทำงาน A/D Converter ที่ได้รับความนิยมในผู้ผลิตเครื่องชั่งฯ คือ “Double Slop Techniques” หรือบางทีอาจเรียกว่า “Dual-ramp Techniques” ซึ่งเป็นเทคนิคที่ใช้ใน A/D Converter ให้ผลการทำงานที่เสถียรในการแปลงสัญญาณเนื่องจากวงจรไฟฟ้ามีสัญญาณแรงดันไฟฟ้าอ้างอิง (Vref) เพื่อเปรียบเทียบกับสัญญาณแรงดันไฟฟ้าด้านทางเข้า (Vin) ของ A/D Converter ตลอดเวลาทำให้มีการปรับตัวตัดเอาผลกระทบของการเลื่อนไหล (Shift) เมื่อใช้วงจรไปนานๆ หรือแม้แต่สัญญาณแรงดันด้านเข้า (Vin) ของ A/D Converter มีการเปลี่ยนแปลงอย่างรวดเร็วก็ตาม
ขั้นตอนการทำงานของ A/D Converter เทคนิคแบบสโลปคู่ ขอให้ยึดรูปที่ 28 เป็นหลัก ในการอธิบายแต่ก็มีรูปแทรกเป็นระยะเพราะบางรูปให้เห็นหรือสร้างมุมมองให้ข้อมูลที่ดี เราเริ่มกัน
รูปที่ 28 A/D Converter เทคนิคแบบสโลปคู่ (Double Slop Techniques; Dual-ramp Integrating)
1) เริ่มต้นรอบการทำงานด้วยการรีเซ็ตวงจรนับ (Counter)
2) แรงดันไฟฟ้าไต่ระดับ ramp อยู่ที่ศูนย์, out put ที่ตัวเปรียบเทียบ (comparator; IC2) เริ่มต้นเป็นศูนย์, ไม่มีสัญญาณนาฬิกาจ่ายให้กับวงจรนับเลขฐานสอง (Binary counter)
3) เมื่อแรงดันไฟฟ้าด้านเข้า (Vin) ถูกจ่ายเข้าขาเข้า inverting (-) ของวงจร integrator (IC1) ความชันของกราฟแรงดันไฟฟ้าไต่ระดับ ramp ด้านทางออกของวงจร integrator มีทิศทางเป็นลบ เพราะป้อน input เข้าขา inverting (-) ของ Op-Amp แรงดันไฟฟ้าจะถูกป้อนอัดเข้าไปใน Capacitance C1 ภายในระยะเวลาคงที่ค่าหนึ่ง (Fixed input time) ส่วนจะมีความชันเป็นลบมากน้อยไม่คงที่ขึ้นอยู่กับค่าแรงดันไฟฟ้าด้านเข้า (Vin) ซึ่งจะแปรผันโดยตรงกับค่าน้ำหนักที่ชั่ง
4) ค่าแรงดันไฟฟ้าลบนี้ทำให้ output ของ comparator; IC2 ให้สัญญาณโลจิก “High” ทำให้สัญญาณนี้ไปกระตุ้น (enable) ตัว AND Gate (IC3) ทำงานและยอมให้สัญญาณพัลส์นาฬิกาผ่านตัวมันเข้าไปยังวงจรนับเลขฐานสอง (Binary counter) ให้เริ่มนับจำนวนพัลซ์ของสัญญาณนาฬิกาเพิ่มขึ้นไปเรื่อยๆ ทั้งนี้ขั้นตอน 3) และ 4) เกิดขึ้นพร้อมๆกัน ด้วยเหตุนี้หากสัญญาณนาฬิกามีความเที่ยงสูงยิ่งส่งผลให้สัญญาณพัลส์หรือความถี่ของสัญญาณพัลส์ดีมากขึ้นผลการวัดยิ่งดีมากขึ้น โดยปกติจะเป็น Quartz-crystal oscillator clock
รูปที่ 29 A/D Converter เทคนิคแบบสโลปคู่ (เป็น Double Slop มีค่าเป็น “บวก” เพราะหารูปไม่ได้แต่ขอให้กลับบนลงล่างเอาเอง นะ....)
รูปที่ 30 แรงดันไฟฟ้าอ้างอิง (Vref) นี้จะถูกใช้เป็นต้องอ้างอิงและคอยตรวจสอบ Excitation Voltage ของ Load cells
5) วงจร integrator (IC1) จะให้สัญญาณด้านทางเข้าเพียงคาบเวลาที่คงที่ขณะหนึ่ง (Fixed input time)
6) หลังจากนั้นวงจรควบคุมจะทำการเคลียร์วงจรนับ พร้อมกับเปลี่ยนสัญญาณด้านทางเข้าของวงจร integrator (IC1) ไปต่อกับแรงดันไฟฟ้าไต่ระดับ ramp อ้างอิงที่มีค่าเป็นลบ (-Vref)
7) ขณะแรงดันไฟฟ้าไต่ระดับ ramp อ้างอิงที่มีค่าเป็นลบ (-Vref) ถูกป้อนเข้าวงจร integrator (IC1) ความชันของแรงดันไฟฟ้า ramp ด้านทางออกของวงจร integrator มีทิศทางเป็นบวก (เพราะป้อน input ที่เป็น - เข้าขา inverting (-) ของ Op-Amp) เกิดการปล่อยปล่อยแรงดันไฟฟ้าที่อยู่ใน Capacitance C1 ผ่านตัวต้านทานที่มีความเสถียรสูงด้วยอัตราคงที่ ทั้งนี้ความชันของเส้นกราฟ ramp จะมีค่าคงที่เพราะแรงดันไฟฟ้า ramp อ้างอิงที่มีค่าเป็นลบ (-Vref) คงที่ นอกจากนี้แรงดันไฟฟ้าอ้างอิง (Vref) นี้ยังถูกใช้เป็นตัวอ้างอิงสำหรับตรวจสอบ Excitation Voltage ของ Load cells อีกด้วย ยิ่งแรงดันไฟฟ้าอ้างอิง (Vref) ถูกต้องและเสถียรมากเท่าไรนั้นแสดงว่า Indicator; IND ตัวนั้นแจ๋วๆๆ
8) ทันทีที่ปล่อยปล่อยแรงดันไฟฟ้าที่อยู่ใน Capacitance C1 ผ่านตัวต้านทานที่มีความเสถียรสูงด้วยอัตราคงที่ วงจรนับเลขฐานสอง (Binary counter) จะเริ่มนับใหม่จนกระทั่งแรงดันไฟฟ้าด้านทางออกวงจร integrator (IC1) ตกลงเป็น “ศูนย์” ใช้ระยะเวลา t2 รูปที่ 31 จำนวนพัลส์ที่นับได้ด้วย Binary counter (รูปที่ 32) นี้แหละคือตัวแทนของค่าน้ำหนักที่ชั่งได้ หากเราสามารถให้เครื่องชั่งไม่อัตโนมัติแสดงค่าสลับระหว่างค่าน้ำหนักที่ชั่งได้กับจำนวนพัลส์ที่ Binary counter นับได้ เราจะเข้าใจทันที่ว่า Weighing Instrument ทำงานอย่างไร แต่ส่วนใหญ่ผู้ผลิตไม่ยอมบอกมันมีปุ่มลับเฉพาะ....
รูปที่ 31 A/D Converter หลักการของเทคนิค Double Slop Ramp
รูปที่ 32 การทำงานของวงจรนับเลขฐานสอง (Binary counter)
9) ณ แรงดันไฟฟ้าด้านทางออกวงจร integrator (IC1) ตกลงเป็น “ศูนย์” ที่จุดนี้ output ของ comparator ให้สัญญาณโลจิก “Low” ทำให้สัญญาณนี้ไปกระตุ้น (enable) ตัว AND Gate (IC3) ปิดทำงานและทำให้สัญญาณพัลส์นาฬิกาที่ป้อนให้วงจรนับเลขฐานสองหยุดทำงาน
10) วงจรควบคุมจะทำการตรวจสอบ เปลี่ยน และ ให้วงจรนับเลขฐานสองเกิดการค้าง (Latch) จากนั้นทำการเคลียร์วงจรนับอีกครั้ง แล้วเริ่มรอบการทำงานใหม่ (Measuring cycle) จากขั้นตอน 1) ถึง 10) แต่ละรอบการทำงาน (Measuring cycle) โดยทั่วไปจะอยู่ที่ 50 – 100 mSec ดังนั้นภายใน 1 วินาทีจะมีรอบการทำงาน (Measuring cycle) เกิดขึ้นหลายรอบ อนุกรมของรอบการทำงานดังกล่าวถือเป็นการ “Sampling” หรือจำนวนครั้งในการสุ่มตัวอย่างสัญญาณต่อระยะเวลาหนึ่งและจำนวน sampling ของ A/D Convertor นี้เองจึงเป็นปัจจัยที่มีผลต่อความถูกต้องแม่นยำและความรวดเร็วในการทำงานของเครื่องชั่งฯ ที่สำคัญปัจจัยหนึ่งที่เราต้องพิจารณาและให้ความสนใจหากเครื่องชั่งตวงวัดใดมีปัญหาในเชิงลึก
11) นั้นคือจำนวนพัลส์ที่นับได้ภายในช่วงเวลา t2 ที่ Binary counter นับได้ (ดูรูปที่ 31) เป็นตัวแทนแรงดันไฟฟ้าด้านเข้า (Vin) ซึ่งเป็นสัญญาณอนาล็อกและเป็นตัวแทนค่าน้ำหนักที่ชั่งนั้นเอง ซึ่งต้องทำการเปรียบเทียบและแทนค่าระหว่างจำนวนพัลส์ที่นับได้ภายในช่วงเวลา t2 กับค่าน้ำหนักที่ชั่งซึ่งอาจเรียก “Scaling” โดยจำนวนพัลส์ที่นับได้อาจมีถึง 40,000 พัลส์ (pulses) ต่อการแสดงค่าขั้นหมายมาตรา (d) 10,000 ช่อง หรือ 4 pulses/d ทั้งนี้ขึ้นอยู่กับผู้ผลิตจะออกแบบ
รูปที่ 33 A/D Converter เทคนิคแบบสโลปคู่ (Double Slop Techniques) ที่อธิบายในอีกรูปแบบ
ส่วนเทคนิคการทำงานของ A/D Converter แบบต่างๆก็ไปหาอ่านศึกษากันต่อเองนะ เพียงแต่เทคนิคนี้ได้รับการบอกเล่าต่อกันมาว่านิยมใช้ในเครื่องชั่งไม่อัตโนมัติกันอย่างมากหลักการทำงานหนึ่งจึงยกตัวอย่างมาเพียงเทคนิคเดียว แค่เพียงเทคนิคเดียวก็เล่นเอาเหนื่อยๆๆ อยากสารภาพว่าหากให้อธิบายหลายเทคนิคนั้นทำไม่ได้เพราะผมเองก็ไม่รู้เหมือนกันและไม่ได้ศึกษาเพราะไม่เก่งพอต้องให้คนอื่นทำแทนนะ เรื่องนี้ยอมรับว่าไม่รู้จริงผิดพลาดประการใดก็ขอโทษ ท่านทั้งหลายมานะที่นี้นะขอรับ.... มี PowerPoint เรื่องหลักการทำงานเครื่องชั่งไม่อัตโนมัติแปะไว้ใน www.cbwmthai.org ในส่วนของ E-Book ไว้ให้แล้วหากสนใจก็ไป download มาอ่าน ถ้าไม่สนใจก็ปล่อยมันไว้อย่างนั้นต่อไป... แต่ทำให้แล้ว.....
ความละเอียดของตัวแปลงสัญญาณอนาล็อกเป็นดิจิตอล (Resolution of A/D Converter)
แต่ละจำนวนตัวเลขฐานสอง ถูกเรียกว่า “Bit” เมื่อนำตัวเลขหลายๆ ตัวรวมกลุ่มกันเป็นชุดก็จะกลายเป็น “Word” หรือ “Digital Code” ยกตัวอย่างของชุดของตัวเลขฐานสองที่รวมตัวกันเป็น word เป็น “010” ซึ่งมีตัวเลขฐานสองทั้งหมด 3 ตัวเลขหรือ 3 bits แต่หากชุดของตัวเลขฐานสองที่รวมตัวกันเป็น word เป็น “0101” ซึ่งมีตัวเลขฐานสองทั้งหมด 4 ตัวเลขหรือ 4 bits นั้นเอง
(ก)
(ข)
รูปที่ 34 การแปรสัญญาณอนาล็อกเป็นดิจิตอลแบบ 3 บิต (ก) และ 10 บิต (ข) ของ A/D Converter
รูปที่ 35 ความละเอียด (Resolution) ของการแปรสัญญาณอนาล็อกเป็นดิจิตอล และการแปรดิจิตอลเป็นสัญญาณอนาล็อก
ดังนั้นการบ่งบอกค่าความละเอียดของการทำงานของ A/D Converter จึงบ่งบอกเป็นจำนวนบิท (bits) ตัวอย่างเช่น A/D Converter 24 bits นั้นหมายถึง A/D Converter สามารถแบ่งระดับแรงดันสัญญาณอนาล็อกด้านทางเข้า (input) ได้เป็น Digital Code ได้ถึง
ดังนั้นหากระดับแรงดันสัญญาณอนาล็อกด้านทางเข้า (input) เท่ากับ 10 V แล้ว A/D Converter จะมี Rresolution เท่ากับ
เรียก 0.596 mV ว่า “Minimum detectable signal level” ซึ่งในกรณีของเครื่องชั่งนั้นหมายถึงค่าขั้นหมายมาตรา d หากต้องการให้เครื่องชั่งเปลี่ยนแปลงการแสดงค่าน้ำหนักเปลี่ยนไป 1d ก็ต้องทำการเปลี่ยนแปลง 0.596 mV ที่ความดันไฟฟ้าขาเข้า A/D Converter ลองนึกดูสิครับเครื่องชั่งนี้สามารถมีค่าขั้นหมายมาตราได้ถึง 16,777,216 ช่อง น่าตื่นตาตื่นใจจริงๆ แต่ในทางปฏิบัติแล้วมันทำได้ยากมากหากทำแล้วให้ผลการชั่งที่ถูกต้องจริงๆ แต่ถ้าหากต้องการ “ความมัน” ให้มันแสดงผลการชั่งได้โดยไม่สนใจว่าถูกต้องหรือไม่ก็ทำไปเถอะ ....เจ้านาย....
(4) Computer / Data processing (scaling) ถือสัญญาณดิจิตอลหรือจำนวนพัลส์ที่นับได้ครั้งสุดท้ายในการทำงานของ A/D converter ภายในช่วงเวลา t2 ในรูปที่ 31 ซึ่งแทนค่าแรงดันไฟฟ้าด้านเข้า (Vin) ตัว A/D converter ซึ่งเป็นสัญญาณอนาล็อกตัวขยายสัญญาณโดยแทนค่าน้ำหนักที่ชั่งได้จะถูกนำมาประมวลเป็นค่าความสัมพันธ์ของผลการชั่งน้ำหนัก แทนกันหลายช่วงต่อนะ
(5) แหล่งกำลังไฟฟ้าอ้างอิง (Reference power source; Vref) เพื่อสร้างความมั่นใจของระบบการทำงานของการกระตุ้นโหลดเซลล์และความแม่นยำของ A/D Converter การใช้แหล่งกำลังไฟฟ้าอ้างอิงเพื่อเลี้ยงระบบดังกล่าวด้วยวงจรที่เหมาะสมจะทำให้เกิดการตรวจสอบการทำงานของระบบการชั่งได้ดี หากแหล่งกำลังไฟฟ้าหลักมีการเปลี่ยนความดันหรือกระแสไฟฟ้า จะส่งผลทำให้โหลดเซลล์ทำงานผิดพลาด วงจรซึ่งใช้แหล่งกำลังไฟฟ้าอ้างอิงจะเป็นตัวช่วยตรวจสอบสภาวะดังกล่าวและส่งสัญญาณเตือนออกมาถึงความบกพร่องของเครื่องชั่ง ทำให้ผลการชั่งที่ถูกต้องแม่นยำ
รูปที่ 36 ตัวอย่างข้อกำหนเทคนิคของส่วนแสดงผลการชั่ง (W&I Indicator Specification)
โดยทั่วไปสายไฟฟ้าที่เชื่อมระหว่างโหลดเซลล์กับระบบการทำงานของเครื่องชั่ง จะมีสายสัญญาณ 4 สายหลักๆ ประกอบด้วยสายไฟฟ้าจากแหล่งจ่ายแรงดันไฟฟ้าจำนวน 2 สายคือ +Ex และ –Ex และสายสัญญาณไฟฟ้าด้านทางออกจากตัวโหลดเซลล์จำนวน 2 สายคือ +Sig และ –Sig เราเรียกระบบสายสัญญาณที่มี 4 สายนี้ว่า “4 wire load cell” แต่ในท้องตลาดโดยทั่วไป ผู้ผลิตได้มีทางเลือกเพิ่มขึ้นอีกระบบหนึ่งซึ่งเป็นระบบที่มีเสถียรภาพมากกว่าระบบสายสัญญาณที่มี 4 สาย เรียกว่า “6 wire load cell” (ดูรูปที่ 36) ระบบดังกล่าวนี้มีสายสัญญาณเพิ่มขึ้นอีก 2 สายคือ +Sense และ –Sense สายสัญญาณทั้งสองนี้ทำหน้าที่ตรวจสอบแรงดันไฟฟ้าจากแหล่งจ่ายกำลังไฟฟ้าสำหรับกระตุ้นโหลดเซลล์ที่ส่งไปยังโหลดเซลล์ว่ายังคงมีค่าแรงดันคงที่และเท่ากับแรงดันไฟฟ้าที่กำหนดตลอดเวลาช่วงระยะการทำงานหรือไม่ หากสายสัญญาณ +Sense และ –Sense ตรวจสอบพบว่าแรงดันไฟฟ้าด้านทางเข้าโหลดเซลล์หรือด้านกระตุ้นโหลดเซลล์นั้นต่ำหรือสูงเกินกว่าที่กำหนด ก็จะการส่งสัญญาณไปยังแหล่งจ่ายไฟฟ้ากำลังเพื่อทำการปรับแรงดันกระตุ้น (excitation voltage) ให้เป็นไปตามที่กำหนด ด้วยเหตุนี้จึงส่งผลให้โหลดเซลล์ที่เป็นแบบ “6 wire load cell” จึงสามารถติดตั้งโหลดเซลล์ได้ระยะไกลเกินกว่า 20 เมตรห่างออกจากส่วนแสดงค่า (indicator; IND)
รูปที่ 37 ระบบสายสัญญาณที่มี 6 สาย เรียกว่า “6 wire load cell”
การเชื่อมต่อโหลดเซลล์หลายตัวเข้าด้วยกันเป็นเครื่องชั่งไม่อัตโนมัติ
การนำโหลดเซลล์หลายตัว เช่น โหลดเซลล์ 4 ตัวมาต่อเชื่อมกันเพื่อให้ทำงานร่วมกันเป็นเครื่องชั่งรถยนต์บรรทุก 1 เครื่องหรือ 1 ระบบการชั่ง จึงเป็นนำเอาวงจรไฟฟ้าวีทสโตนบริด (Whetstone Bridge Circuit) ของ Strain gauges หลายวงจรมาต่อเชื่อมกันในรูปแบบอนุกรม หรือแบบขนานดังในรูปที่ 38 ในรูปดังกล่าวเราจะเห็นแรงดันไฟฟ้ากระตุ้น (Excitation Voltage) ระบบโหลดเซลล์เท่ากับ VE ก่อให้เกิดแรงดันไฟฟ้าด้านทางออกของระบบวงจรรวมวงจรไฟฟ้าวีทสโตนบริด (Whetstone Bridge Circuit) ของ Strain gauges หรือระบบโหลดเซลล์เท่ากับ DV ในส่วนเครื่องหมาย “-“ แสดงถึงแรงอัด (Compression Force) กระทำต่อ Strain Gauges และเครื่องหมาย “+” แสดงถึงแรงดึง (Tension Force) กระทำต่อ Strain Gauges ที่ตั้งฉากกับแกนแรงอัด
เมื่อเครื่องชั่งหรือระบบการชั่ง 1 ระบบที่ประกอบด้วยโหลดเซลล์จำนวนหลายตัวทำงานร่วมกัน การกระจายน้ำหนักจากส่วนรับน้ำหนัก (Load receptor) ลงบนโหลดเซลล์แต่ละตัวจึงก่อให้เกิดปัญหาผลการชั่งน้ำหนักมีผลผิด นอกเสียจากเราใช้โหลดเซลล์ทั้งหมดทุกตัวมีคุณสมบัติเหมือนกันทุกประการ เช่น rate output ( mV/V), Load cell impedance (W) เป็นต้น ซึ่งในทางปฏิบัติเป็นไปไม่ได้ถึงแม้จะเป็นโหลดเซลล์รุ่นเดียวกันจากผู้ผลิตเดียวกันก็ตาม การเกิดผลการชั่งน้ำหนักผิด (Weighing error) ดังกล่าวนี้เราเรียกว่า “Corner Effect” ซึ่งสามารถแก้ไขด้วยการปรับแต่งให้โหลดเซลล์แต่ละตัวให้แรงดันไฟฟ้าด้านทางออกของวงจรไฟฟ้าวีทสโตนบริด (Whetstone Bridge Circuit) ของ Strain gauges ของแต่ละโหลดเซลล์มีค่าเท่ากัน ซึ่งทำให้ผลการชั่งเปลี่ยนแปลงเมื่อเคลื่อนย้ายภาระโหลดที่กระทำต่อส่วนรับน้ำหนักจากจุดหนึ่งไปยังอีกจุดหนึ่ง
รูปที่ 38 ระบบวงจรไฟฟ้าวีทสโตนบริด (Whetstone Bridge Circuit) ของ Strain gauges หลายวงจรมาต่อเชื่อมกันในรูปแบบอนุกรม (Series) หรือแบบขนาน (Parallel)
รูปที่ 39 ระบบสายสัญญาณ “4 wire load cell” &“6 wire load cell” ; 1 Load Cell กับ I IND
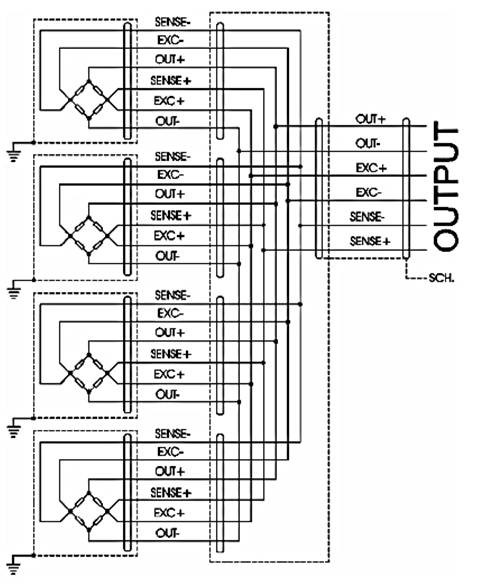
เทคนิคที่ใช้ในการปรับแต่งให้โหลดเซลล์แต่ละตัวให้แรงดันไฟฟ้าด้านทางออกของวงจรไฟฟ้าวีทสโตนบริด (Whetstone Bridge Circuit) ของ Strain gauges ของแต่ละโหลดเซลล์มีค่าเท่ากัน จึงเป็นการปรับค่าความต้านทาน (RW ; รูปที่ 41.2) ที่ต่ออนุกรมอยู่กับตัวป้อนแรงดันไฟฟ้ากระตุ้นแต่ละโหลดเซลล์ในระหว่างการติดตั้งระบบ ด้วยการที่เราวางตุ้มน้ำหนักแบบมาตราบริเวณแต่ละมุมของส่วนรับน้ำหนักหรือที่เรียกว่า “Shift Test” หรือ “Eccentric Test” จากนั้นทำการวัดค่าแรงดันไฟฟ้าด้านทางออกของแต่ละโหลดเซลล์โดยเราจะทำการปรับลดแรงดันไฟฟ้ากระตุ้นโหลดเซลล์เพื่อลด Sensitivity ในตัวที่มีแรงดันไฟฟ้าด้านทางออกที่มีค่าสูงให้ลดลงมีค่าเท่ากับตัวที่ให้แรงดันไฟฟ้าด้านทางออกต่ำ ทั้งนี้การปรับแต่งปริมาณแรงดันไฟฟ้ากระตุ้นโหลดเซลล์ดังกล่าวจำเป็นต้องใช้เวลาซึ่งต้องดำเนินการซ้ำแล้วซ้ำอีกและยิ่งนานมากขึ้นหากพิกัดกำลังเครื่องชั่งสูง เนื่องจากต้องใช้เวลาในการเคลื่อนย้ายตุ้มหนักแบบมาตราไปยังแต่ละมุมบนส่วนรับน้ำหนัก ซึ่งหน้าที่ดังกล่าววเป็นของผู้ผลิตเครื่องชั่งที่ไปติดตั้งเครื่องชั่งให้กับลูกค้าของตน มันไม่ใช่หน้าที่ของหน่วยงานของรัฐหรือชั่งตวงวัด (ชั่งตวงวัดพูดคำว่า "Outsource" แต่ผู้ประกอบการชั่งตวงวัดทำ "Outsource" มานานแล้วตั้งแต่ชั่งตวงวัดจัดงบประมาณรถยนต์บรรทุกเครนพร้อมแบบมาตรา 10,000 kg) ผู้ผลิตต้องลงทุนในแบบมาตราและเครื่องมืออุปกรณ์บ้างไม่ใช่ผลักภาระค่าใช้จ่ายมายังภาครัฐ นอกจากเทคนิคนี้แล้วยังมีอีกหลายเทคนิคในการปรับแต่โหลดเซลล์ที่มีจำนหลายตัวใน 1 ระบบเครื่องชั่ง
.png)
รูปที่ 40 ระบบสายสัญญาณ “4 wire load cell” &“6 wire load cell” ; Load Cells + Junction Box + IND
รูปที่ 41.1 ระบบสายสัญญาณ “4 wire load cell” และ “6 wire load cell”
รูปที่ 41.2แรงดันไฟฟ้ากระตุ้นแต่ละโหลดเซลล์ และสายสัญญาณ 2 สายคือ +Sense และ –Sense ทั้งสองนี้ทำหน้าที่ตรวจสอบแรงดันไฟฟ้ากระตุ้นโหลดเซลล์ว่ายังคงมีค่าแรงดันคงที่และเท่ากับแรงดันไฟฟ้าที่กำหนดตลอดเวลาช่วงระยะการทำงาน ณ จุด “A” และ “D”
รูปที่ 41.3 กล่องรวมสัญญาณ (Junction Box) ระหว่างโหลดเซลล์ก่อนส่งสัญญาณไปยัง Indicator; IND ต้องร้อยลวดผูกซีลชั่งตวงวัดป้องกันการปรับแต่งความเที่ยง
รูปที่ 42.1 ตัวอย่างองค์ประกอบเครื่องชั่งไม่อัตโนมัติ
รูปที่ 42.2 ตัวอย่างองค์ประกอบเครื่องชั่งไม่อัตโนมัติ
ภายในจอแสดงค่าจะไม่มีการทำงานใดๆ นอกจากการรับสัญญาณเพื่อมาแสดงค่าให้ผู้ใช้งานเครื่องชั่งรับรู้ค่าน้ำหนักที่นำมาแสดง ลักษณะการแสดงค่าของจอแสดงค่าซึ่งนิยมใช้กับเครื่องชั่งไม่อัตโนมัติได้แก่
1) 7 Segment มีลักษณะการนำเอาเส้นตรง 7 เส้นประกอบกันเป็นตัวเลขอาราบิก ดังรูปที่ 43
รูปที่ 43 การแสดงค่าแบบ “7 Segment” ของจอแสดงค่าเครื่องชั่ง
2) LCD จะมีลักษณะเป็นขาวและดำ
3) Dot Matrix ประกอบด้วยจุดทั้งหมด 49 จุด เรียงตัวแถวละ 5 จุดจำนวน 7 แถวเป็นรูปสี่เหลี่ยมพื้นผ้า ดูรูปที่ 44
รูปที่ 44 การแสดงค่าแบบ “Dot Matrix” ของจอแสดงค่าเครื่องชั่ง
จบตอนที่ 1/2 สามารถไปอ่านในตอนจบตอนที่ 2/2 ต่อครับ เพราะเรื่องมันยาวประมาณ 100 หน้า A4 และกลัว Server มันช้าเพราะรู้สึกว่ารูปภาพจะขึ้นช้า เลยแบ่งออกไป 2 ตอน................
ชั่งตวงวัด; GOM MOC
นนทบุรี
22 กันยายน 2565